|
||||
|
|
10.1.3 Программы обработки прерываний 10.2 ДИСКОВЫЕ ДРАЙВЕРЫ 10.3.3 Терминальный драйвер в режиме без обработки символов 10.3.4 Опрос терминала 10.3.5 Назначение операторского терминала 10.3.6 Драйвер косвенного терминала 10.3.7 Вход в систему 10.4 ПОТОКИ 10.4.1 Более детальное рассмотрение потоков 10.4.2 Анализ потоков 10.5 ВЫВОДЫ 10.6 УПРАЖНЕНИЯ ГЛАВА 10. ПОДСИСТЕМА УПРАВЛЕНИЯ ВВОДОМ-ВЫВОДОМПодсистема управления вводом-выводом позволяет процессам поддерживать связь с периферийными устройствами, такими как накопители на магнитных дисках и лентах, терминалы, принтеры и сети, с одной стороны, и с модулями ядра, которые управляют устройствами и именуются драйверами устройств, с другой. Между драйверами устройств и типами устройств обычно существует однозначное соответствие: в системе может быть один дисковый драйвер для управления всеми дисководами, один терминальный драйвер для управления всеми терминалами и один ленточный драйвер для управления всеми ленточными накопителями. Если в системе имеются однотипные устройства, полученные от разных изготовителей — например, две марки ленточных накопителей, — в этом случае можно трактовать однотипные устройства как устройства двух различных типов и иметь для них два отдельных драйвера, поскольку таким устройствам для выполнения одних и тех же операций могут потребоваться разные последовательности команд. Один драйвер управляет множеством физических устройств данного типа. Например, один терминальный драйвер может управлять всеми терминалами, подключенными к системе. Драйвер различает устройства, которыми управляет: выходные данные, предназначенные для одного терминала, не должны быть посланы на другой. Система поддерживает "программные устройства", с каждым из которых не связано ни одно конкретное физическое устройство. Например, как устройство трактуется физическая память, чтобы позволить процессу обращаться к ней извне, пусть даже память не является периферийным устройством. Команда ps обращается к информационным структурам ядра в физической памяти, чтобы сообщить статистику процессов. Еще один пример: драйверы могут вести трассировку записей в удобном для отладки виде, а драйвер трассировки дает возможность пользователям читать эти записи. Наконец, профиль ядра, рассмотренный в главе 8, выполнен как драйвер: процесс записывает адреса программ ядра, обнаруженных в таблице идентификаторов ядра, и читает результаты профилирования. В этой главе рассматривается взаимодействие между процессами и подсистемой управления вводом-выводом, а также между машиной и драйверами устройств. Исследуется общая структура и функционирование драйверов и в качестве примеров общего взаимодействия рассматриваются дисковые и терминальные драйверы. Завершает главу описание нового метода реализации драйверов потоковых устройств. 10.1 ВЗАИМОДЕЙСТВИЕ ДРАЙВЕРОВ С ПРОГРАММНОЙ И АППАРАТНОЙ СРЕДОЙВ системе UNIX имеется два типа устройств — устройства ввода/вывода блоками и устройства неструктурированного или посимвольного ввода-вывода. Как уже говорилось в главе 2, устройства ввода-вывода блоками, такие как диски и ленты, для остальной части системы выглядят как запоминающие устройства с произвольной выборкой; к устройствам посимвольного ввода-вывода относятся все другие устройства, в том числе терминалы и сетевое оборудование. Устройства ввода-вывода блоками могут иметь интерфейс и с устройствами посимвольного ввода-вывода. Пользователь взаимодействует с устройствами через посредничество файловой системы (см. Рисунок 2.1). Каждое устройство имеет имя, похожее на имя файла, и пользователь обращается к нему как к файлу. Специальный файл устройства имеет индекс и занимает место в иерархии каталогов файловой системы. Файл устройства отличается от других файлов типом файла, хранящимся в его индексе, либо "блочный", либо "символьный специальный", в зависимости от устройства, которое этот файл представляет. Если устройство имеет как блочный, так и символьный интерфейс, его представляют два файла: специальный файл устройства ввода-вывода блоками и специальный файл устройства посимвольного ввода-вывода. Системные функции для обычных файлов, такие как open, close, read и write, имеют то же значение и для устройств, в чем мы убедимся позже. Системная функция ioctl предоставляет процессам возможность управлять устройствами посимвольного ввода-вывода, но не применима в отношении к файлам обычного типа[29]. Тем не менее, драйверам устройств нет необходимости поддерживать полный набор системных функций. Например, вышеупомянутый драйвер трассировки дает процессам возможность читать записи, созданные другими драйверами, но не позволяет создавать их. 10.1.1 Конфигурация системыЗадание конфигурации системы это процедура указания администраторами значений параметров, с помощью которых производится настройка системы. Некоторые из параметров указывают размеры таблиц ядра, таких как таблица процессов, таблица индексов и таблица файлов, а также сколько буферов помещается в буферном пуле. С помощью других параметров указывается конфигурация устройств, то есть производятся конкретные указания ядру, какие устройства включаются в данную системную реализацию и их "адрес". Например, в конфигурации может быть указано, что терминальная плата вставлена в соответствующий разъем на аппаратной панели. Существует три стадии, на которых может быть указана конфигурация устройств. Во-первых, администраторы могут кодировать информацию о конфигурации в файлах, которые транслируются и компонуются во время построения ядра. Информация о конфигурации обычно указывается в простом формате, и программа конфигурации преобразует ее в файл, готовый для трансляции. Во-вторых, администраторы могут указывать информацию о конфигурации после того, как система уже запущена; ядро динамически корректирует внутренние таблицы конфигурации. Наконец, самоидентифицирующиеся устройства дают ядру возможность узнать, какие из устройств включены. Ядро считывает аппаратные ключи для самонастройки. Подробности задания системной конфигурации выходят за пределы этой книги, однако во всех случаях результатом процедуры задания конфигурации является генерация или заполнение таблиц, составляющих основу программ ядра. Интерфейс "ядро — драйвер" описывается в таблице ключей устройств ввода-вывода блоками и в таблице ключей устройств посимвольного ввода-вывода (Рисунок 10.1). Каждый тип устройства имеет в таблице точки входа, которые при выполнении системных функций адресуют ядро к соответствующему драйверу. Функции open и close, вызываемые файлом устройства, "пропускаются" через таблицы ключей устройств в соответствии с типом файла. Функции mount и umount так же вызывают выполнение процедур открытия и закрытия устройств, но для устройств ввода-вывода блоками. Функции read и write, вызываемые устройствами ввода-вывода блоками и файлами в смонтированных файловых системах, запускают алгоритмы работы с буферным кешем, инициирующие реализацию стратегической процедуры работы с устройствами. Некоторые из драйверов запускают эту процедуру изнутри из процедур чтения и записи. Более подробно взаимодействие с каждым драйвером рассматривается в следующем разделе. Интерфейс "аппаратура — драйвер" состоит из машинно-зависимых управляющих регистров или команд ввода-вывода для управления устройствами и векторами прерываний: когда происходит прерывание от устройства, система идентифицирует устройство, вызвавшее прерывание, и запускает программу обработки соответствующего прерывания. Очевидно, что "программные устройства", такие как драйвер системы построения профиля ядра (глава 8) не имеют аппаратного интерфейса, однако программы обработки других прерываний могут обращаться к "обработчику программного прерывания" непосредственно. Например, программа обработки прерывания по таймеру обращается к программе обработки прерывания системы построения профиля ядра. Администраторы устанавливают специальные файлы устройств командой mknod, в которой указывается тип файла (блочный или символьный), старший и младший номера устройства. Команда mknod запускает выполнение системной функции с тем же именем, создающей файл устройства. Например, в командной строке mknod /dev/tty13 c 2 13 "/dev/tty13" — имя файла устройства, "c" указывает, что тип файла — "символьный специальный" ("b", соответственно, блочный), "2" — старший номер устройства, "13" — младший номер устройства. Старший номер устройства показывает его тип, которому соответствует точка входа в таблице ключей устройств, младший номер устройства — это порядковый номер единицы устройства данного типа. Если процесс открывает специальный блочный файл с именем "/dev/dsk1" и кодом 0, ядро запускает программу gdopen в точке 0 таблицы ключей устройств блочного ввода-вывода (Рисунок 10.2); если процесс читает специальный символьный файл с именем "/dev/mem" и кодом 3, ядро запускает программу mmread в точке 3 таблицы ключей устройств посимвольного ввода-вывода. Программа nulldev — это "пустая" программа, используемая в тех случаях, когда отсутствует необходимость в конкретной функции драйвера. С одним старшим номером устройства может быть связано множество периферийных устройств; младший номер устройства позволяет отличить их одно от другого. Не нужно создавать специальные файлы устройств при каждой загрузке системы; их только нужно корректировать, если изменилась конфигурация системы, например, если к установленной конфигурации были добавлены устройства. 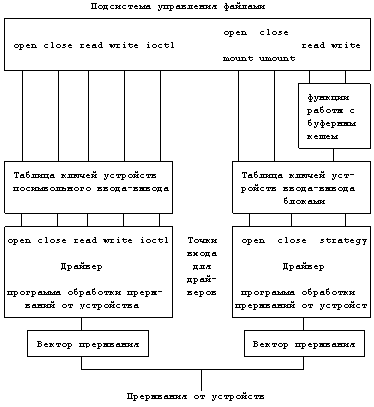 Рисунок 10.1. Точки входа для драйверов 10.1.2 Системные функции и взаимодействие с драйверамиВ этом разделе рассматривается взаимодействие ядра с драйверами устройств. При выполнении тех системных функций, которые используют дескрипторы файлов, ядро, следуя за указателями, хранящимися в пользовательском дескрипторе файла, обращается к таблице файлов ядра и к индексу, где оно проверяет тип файла, и переходит к таблице ключей устройств ввода-вывода блоками или символами. Ядро извлекает из индекса старший и младший номера устройства, использует старший номер в качестве указателя на точку входа в соответствующей таблице и вызывает выполнение функции драйвера в соответствии с выполняемой системной функцией, передавая младший номер в качестве параметра. Важным различием в реализации системных функций для файлов устройств и для файлов обычного типа является то, что индекс специального файла не блокируется в то время, когда ядро выполняет программу драйвера. Драйверы часто приостанавливают свою работу, ожидая связи с аппаратными средствами или поступления данных, поэтому ядро не в состоянии определить, на какое время процесс будет приостановлен. Если индекс заблокирован, другие процессы, обратившиеся к индексу (например, посредством системной функции stat), приостановятся на неопределенное время, поскольку один процесс приостановил драйвер. 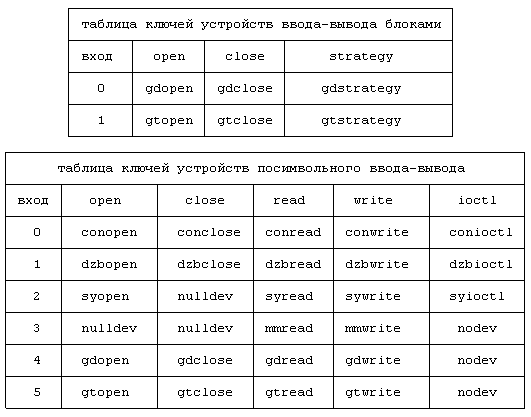 Рисунок 10.2. Пример заполнения таблиц ключей устройств ввода-вывода блоками и символами Драйвер устройства интерпретирует параметры вызова системной функции в отношении устройства. Драйвер поддерживает структуры данных, описывающие состояние каждой контролируемой единицы данного типа устройства; функции драйвера и программы обработки прерываний реализуются в соответствии с состоянием драйвера и с тем, какое действие выполняется в этот момент (например, данные вводятся или выводятся). Теперь рассмотрим каждый интерфейс более подробно. 10.1.2.1 OpenПри открытии устройства ядро следует той же процедуре, что и при открытии файлов обычного типа (см. раздел 5.1), выделяя в памяти индексы, увеличивая значение счетчика ссылок и присваивая значение точки входа в таблицу файлов и пользовательского дескриптора файла. Наконец, ядро возвращает значение пользовательского дескриптора файла вызывающему процессу, так что открытие устройства выглядит так же, как и открытие файла обычного типа. Однако, перед тем, как вернуться в режим задачи, ядро запускает зависящую от устройства процедуру open (Рисунок 10.3). Для устройства ввода-вывода блоками запускается процедура open, закодированная в таблице ключей устройств ввода-вывода блоками, для устройств посимвольного ввода-вывода — процедура open, закодированная в соответствующей таблице. Если устройство имеет как блочный, так и символьный тип, ядро запускает процедуру open, соответствующую типу файла устройства, открытого пользователем: обе процедуры могут даже быть идентичны, в зависимости от конкретного драйвера. алгоритм open /* для драйверов устройств */ входная информация: имя пути поиска режим открытия выходная информация: дескриптор файла { преобразовать имя пути поиска в индекс, увеличить значение счетчика ссылок в индексе; выделить в таблице файлов место для пользовательского дескриптора файла, как при открытии обычного файла; выбрать из индекса старший и младший номера устройства; сохранить контекст (алгоритм setjmp) в случае передачи управления от драйвера; if (устройство блочного типа) { использовать старший номер устройства в качестве указателя в таблице ключей устройств ввода-вывода блоками; вызвать процедуру открытия драйвера по данному индексу: передать младший номер устройства, режимы открытия; } else { использовать старший номер устройства в качестве указателя в таблице ключей устройств посимвольного ввода-вывода; вызвать процедуру открытия драйвера по данному индексу: передать младший номер устройства, режимы открытия; } if (открытие в драйвере не выполнилось) привести таблицу файлов к первоначальному виду, уменьшить значение счетчика в индексе; } Рисунок 10.3. Алгоритм открытия устройства Зависящая от типа устройства процедура open устанавливает связь между вызывающим процессом и открываемым устройством и инициализирует информационные структуры драйвера. Например, процедура open для терминала может приостановить процесс до тех пор, пока в машину не поступит сигнал (аппаратный) о том, что пользователь предпринял попытку зарегистрироваться. После этого инициализируются информационные структуры драйвера в соответствии с принятыми установками терминала (например, скоростью передачи информации в бодах). Для "программных устройств", таких как память системы, процедура open может не включать в себя инициализацию. Если во время открытия устройства процессу пришлось приостановиться по какой-либо из внешних причин, может так случиться, что событие, которое должно было бы вызвать возобновление выполнения процесса, так никогда и не произойдет. Например, если на данном терминале еще не зарегистрировался ни один из пользователей, процесс getty, "открывший" терминал (раздел 7.9), приостанавливается до тех пор, пока пользователем не будет предпринята попытка регистрации, при этом может пройти достаточно большой промежуток времени. Ядро должно иметь возможность возобновить выполнение процесса и отменить вызов функции open по получении сигнала: ему следует сбросить индекс, отменить точку входа в таблице файлов и пользовательский дескриптор файла, которые были выделены перед входом в драйвер, поскольку открытие не произошло. Ядро сохраняет контекст процесса, используя алгоритм setjmp (раздел 6.4.4), прежде чем запустить процедуру open; если процесс возобновляется по сигналу, ядро восстанавливает контекст процесса в том состоянии, которое он имел перед обращением к драйверу, используя алгоритм longjmp (раздел 6.4.4), и возвращает системе все выделенные процедуре open структуры данных. Точно так же и драйвер может уловить сигнал и очистить доступные ему структуры данных, если это необходимо. Ядро также переустанавливает структуры данных файловой системы, когда драйвер сталкивается с исключительными ситуациями, такими, как попытка пользователя обратиться к устройству, отсутствующему в данной конфигурации. В подобных случаях функция open не выполняется. Процессы могут указывать значения различных параметров, характеризующие особенности выполнения процедуры открытия. Из них наиболее часто используется "no delay" (без задержки), означающее, что процесс не будет приостановлен во время выполнения процедуры open, если устройство не готово. Системная функция open возвращает управление немедленно и пользовательский процесс не узнает, произошло ли аппаратное соединение или нет. Открытие устройства с параметром "no delay", кроме всего прочего, затронет семантику вызова функции read, что мы увидим далее (раздел 10.3.4). Если устройство открывается многократно, ядро обрабатывает пользовательские дескрипторы файлов, индекс и записи в таблице файлов так, как это описано в главе 5, запуская определяемую типом устройства процедуру open при каждом вызове системной функции open. Таким образом, драйвер устройства может подсчитать, сколько раз устройство было "открыто", и прервать выполнение функции open, если количество открытий приняло недопустимое значение. Например, имеет смысл разрешить процессам многократно "открывать" терминал на запись для того, чтобы пользователи могли обмениваться сообщениями. Но при этом не следует допускать многократного "открытия" печатающего устройства для одновременной записи, так как процессы могут затереть друг другу информацию. Эти различия имеют смысл скорее на практике, нежели на стадии разработки: разрешение одновременной записи на терминалы способствует установлению взаимодействия между пользователями; запрещение одновременной записи на принтеры служит повышению читабельности машинограмм[30]. 10.1.2.2 ClosеПроцесс разрывает связь с открытым устройством, закрывая его. Однако, ядро запускает определяемую типом устройства процедуру close только в последнем вызове функции close для этого устройства, и то только если не осталось процессов, которым устройство необходимо открытым, поскольку процедура закрытия устройства завершается разрывом аппаратного соединения; отсюда ясно, что ядру следует подождать, пока не останется ни одного процесса, обращающегося к устройству. Поскольку ядро запускает процедуру открытия устройства при каждом вызове системной функции open, а процедуру закрытия только один раз, драйверу устройства неведомо, сколько процессов используют устройство в данный момент. Драйверы могут легко выйти из строя, если при их написании не соблюдалась осторожность: когда при выполнении процедуры close они приостанавливают свою работу и какой-нибудь процесс открывает устройство до того, как завершится процедура закрытия, устройство может стать недоступным для работы, если в результате комбинации вызовов open и close сложилась нераспознаваемая ситуация. алгоритм close /* для устройств */ входная информация: дескриптор файла выходная информация: отсутствует { выполнить алгоритм стандартного закрытия (глава 5ххх); if (значение счетчика ссылок в таблице файлов не 0) goto finish; if (существует еще один открытый файл, старший и младший номера которого совпадают с номерами закрываемого устройства) goto finish; /* не последнее закрытие */ if (устройство символьного типа) { использовать старший номер в качестве указателя в таблице ключей устройства посимвольного ввода-вывода; вызвать процедуру закрытия, определяемую типом драйвера и передать ей в качестве параметра младший номер устройства; } if (устройство блочного типа) { if (устройство монтировано) goto finish; переписать блоки устройства из буферного кеша на устройство; использовать старший номер в качестве указателя в таблице ключей устройства ввода-вывода блоками; вызвать процедуру закрытия, определяемую типом драйвера и передать ей в качестве параметра младший номер устройства; сделать недействительными блоки устройства, оставшиеся в буферном кеше; } finish: освободить индекс; } Рисунок 10.4. Алгоритм закрытия устройства Алгоритм закрытия устройства похож на алгоритм закрытия файла обычного типа (Рисунок 10.4). Однако, до того, как ядро освобождает индекс, в нем выполняются действия, специфичные для файлов устройств. 1. Просматривается таблица файлов для того, чтобы убедиться в том, что ни одному из процессов не требуется, чтобы устройство было открыто. Чтобы установить, что вызов функции close для устройства является последним, недостаточно положиться на значение счетчика ссылок в таблице файлов, поскольку несколько процессов могут обращаться к одному и тому же устройству, используя различные точки входа в таблице файлов. Так же недос таточно положиться на значение счетчика в таблице индексов, поскольку одному и тому же устройству могут соответствовать несколько файлов устройства. Например, команда ls -l покажет, что одному и тому же устройству символьного типа ("c" в начале строки) соответствуют два файла устройства, старший и младший номера у которых (9 и 1) совпадают. Значение счетчика связей для каждого файла, равное 1, говорит о том, что имеется два индекса. crw-w-w- 1 root vis 9, 1 Aug 6 1984 /dev/tty01 crw-w-w- 1 root unix 9, 1 May 3 15:02 /dev/tty01 Если процессы открывают оба файла независимо один от другого, они обратятся к разным индексам одного и того же устройства. 2. Если устройство символьного типа, ядро запускает процедуру закрытия устройства и возвращает управление в режим задачи. Если устройство блочного типа, ядро просматривает таблицу результатов монтирования и проверяет, не располагается ли на устройстве смонтированная файловая система. Если такая система есть, ядро не сможет запустить процедуру закрытия устройства, поскольку не был сделан последний вызов функции close для устройства. Даже если на устройстве нет смонтированной файловой системы, в буферном кеше еще могут находиться блоки с данными, оставшиеся от смонтированной ранее файловой системы и не переписанные на устройство, поскольку имели пометку "отложенная запись". Поэтому ядро просматривает буферный кеш в поисках таких блоков и переписывает их на устройство перед запуском процедуры закрытия устройства. После закрытия устройства ядро вновь просматривает буферный кеш и делает недействительными все буферы, которые содержат блоки для только что закрытого устройства, в то же вре мя позволяя буферам с актуальной информацией остаться в кеше. 3. Ядро освобождает индекс файла устройства. Короче говоря, процедура закрытия устройства разрывает связь с устройством и инициализирует заново информационные структуры драйвера и аппаратную часть устройства с тем, чтобы ядро могло бы позднее открыть устройство вновь. 10.1.2.3 Read и WritеАлгоритмы чтения и записи ядром на устройстве похожи на аналогичные алгоритмы для файлов обычного типа. Если процесс производит чтение или запись на устройстве посимвольного ввода-вывода, ядро запускает процедуры read или write, определяемые типом драйвера. Несмотря на часто встречающиеся ситуации, когда ядро осуществляет передачу данных непосредственно между адресным пространством задачи и устройством, драйверы устройств могут буферизовать информацию внутри себя. Например, терминальные драйверы для буферизации данных используют символьные списки (раздел 10.3.1). В таких случаях драйвер устройства выделяет "буфер", копирует данные из пространства задачи при выполнении процедуры write и выводит их из "буфера" на устройство. Процедура записи, управляемая драйвером, регулирует объем выводимой информации (т. н. управление потоком данных): если процессы генерируют информацию быстрее, чем устройство выводит ее, процедура записи приостанавливает выполнение процессов до тех пор, пока устройство не будет готово принять следующую порцию данных. При чтении драйвер устройства помещает данные, полученные от устройства, в буфер и копирует их из буфера в пользовательские адреса, указанные в вызове системной функции. 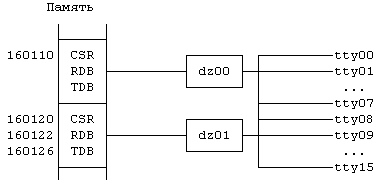 Рисунок 10.5. Отображение в памяти ввода-вывода с использованием контроллера VAX DZ11 Конкретный метод взаимодействия драйвера с устройством определяется особенностями аппаратуры. Некоторые из машин обеспечивают отображение ввода-вывода в памяти, подразумевающее, что конкретные адреса в адресном пространстве ядра являются не номерами ячеек в физической памяти, а специальными регистрами, контролирующими соответствующие устройства. Записывая в указанные регистры управляющие параметры в соответствии со спецификациями аппаратных средств, драйвер осуществляет управление устройством. Например, контроллер ввода-вывода для машины VAX-11 содержит специальные регистры для записи информации о состоянии устройства (регистры контроля и состояния) и для передачи данных (буферные регистры), которые формируются по специальным адресам в физической памяти. В частности, терминальный контроллер VAX DZ11 управляет 8 асинхронными линиями терминальной связи (см. [Levy 80], где более подробно объясняется архитектура машин VAX). Пусть регистр контроля и состояния (CSR) для конкретного терминала DZ11 имеет адрес 160120, передающий буферный регистр (TDB) — адрес 120126, а принимающий буферный регистр (RDB) — адрес 160122 (Рисунок 10.5). Для того, чтобы передать символ на терминал "/dev/tty09", драйвер терминала записывает единицу (1 = 9 по модулю 8) в указанный двоичный разряд регистра контроля и состояния и затем записывает символ в передающий буферный регистр. Запись в передающий буферный регистр является передачей данных. Контроллер DZ11 выставляет бит "выполнено" в регистре контроля и состояния, когда готов принять следующую порцию данных. Дополнительно драйвер может выставить бит "возможно прерывание передачи" в регистре контроля и состояния, что заставляет контроллер DZ11 прерывать работу системы, когда он готов принять следующую порцию данных. Чтение данных из DZ11 производится аналогично. На других машинах имеется программируемый ввод-вывод, подразумевающий, что в машине имеются инструкции по управлению устройствами. Драйверы управляют устройствами, выполняя соответствующие инструкции. Например, в машине IBM 370 имеется инструкция "Start I/O" (Начать ввод-вывод), которая инициирует операцию ввода-вывода, связанную с устройством. Способ связи драйвера с периферийными устройствами незаметен для пользователя. Поскольку интерфейс между драйверами устройств и соответствующими аппаратными средствами является машинно-зависимым, на этом уровне не существует стандартных интерфейсов. Как в случае вводавывода с отображением в памяти, так и в случае программируемого ввода-вывода драйвер может посылать на устройство управляющие последовательности с целью установления режима прямого доступа в память (ПДП) для устройства. Система позволяет осуществлять массовую передачу данных между устройством и памятью в режиме ПДП параллельно с работой центрального процессора, при этом устройство прерывает работу системы по завершении передачи данных. Драйвер организует управление виртуальной памятью таким образом, чтобы ячейки памяти с их действительными номерами использовались для ПДП. Быстродействующие устройства могут иногда передавать данные непосредственно в адресное пространство задачи, без вмешательства буфера ядра. В результате повышается скорость передачи данных, поскольку при этом производится на одну операцию копирования меньше, и, кроме того, объем данных, передаваемых за одну операцию, не ограничивается размером буферов ядра. Драйверы, осуществляющие такую передачу данных без "обработки", обычно используют блочный интерфейс для процедур посимвольного чтения и записи, если у них имеется двойник блочного типа. 10.1.2.4 Стратегический интерфейсЯдро использует стратегический интерфейс для передачи данных между буферным кешем и устройством, хотя, как уже говорилось ранее, процедуры чтения и записи для устройств посимвольного вводавывода иногда пользуются процедурой strategy (их двойника блочного типа) для непосредственной передачи данных между устройством и адресным пространством задачи. Процедура strategy может управлять очередностью выполнения заданий на ввод-вывод, связанный с устройством, или выполнять более сложные действия по планированию выполнения подобных заданий. Драйверы в состоянии привязывать передачу данных к одному физическому адресу или ко многим. Ядро передает адрес заголовка буфера стратегической процедуре драйвера; в заголовке содержится список адресов (страниц памяти) и размеры данных, передаваемых на или с устройства. Аналогичное действие имеет место при работе механизма свопинга, описанного в главе 9. При работе с буферным кешем ядро передает данные с одного адреса; во время свопинга ядро передает данные, расположенные по нескольким адресам (страницы памяти). Если данные копируются из или в адресное пространство задачи, драйвер должен блокировать процесс (или по крайней мере, соответствующие страницы) в памяти до завершения передачи данных. Например, после монтирования файловой системы ядро идентифицирует каждый файл в файловой системе по номеру устройства и номеру индекса. В номере устройства закодированы его старший и младший номера. Когда ядро обращается к блоку, который принадлежит файлу, оно копирует номер устройства и номер блока в заголовок буфера, как уже говорилось ранее в главе 3. Обращения к диску, использующие алгоритмы работы с буферным кешем (например, bread или bwrite), инициируют выполнение стратегической процедуры, определяемой старшим номером устройства. Стратегическая процедура использует значения полей младшего номера и номера блока из заголовка буфера для идентификации места расположения данных на устройстве, а адрес буфера — для идентификации места назначения передаваемых данных. Точно так же, когда процесс обращается к устройству ввода-вывода блоками непосредственно (например, открывая устройство и читая или записывая на него), он использует алгоритмы работы с буферным кешем, и интерфейс при этом функционирует вышеописанным образом. 10.1.2.5 IoctlСистемная функция ioctl является обобщением специфичных для терминала функций stty (задать установки терминала) и gtty (получить установки терминала), имевшихся в ранних версиях системы UNIX. Она выступает в качестве общей точки входа для всех связанных с типом устройства команд и позволяет процессам задавать аппаратные параметры, ассоциированные с устройством, и программные параметры, ассоциированные с драйвером. Специальные действия, выполняемые функцией ioctl для разных устройств различны и определяются типом драйвера. Программы, использующие вызов ioctl, должны должны знать, с файлом какого типа они работают, так как они являются аппаратно-зависимыми. Исключение из общего правила сделано для системы, которая не видит различий между файлами разных типов. Более подробно использование функции ioctl для терминалов рассмотрено в разделе 10.3.3. Синтаксис командной строки, содержащей вызов системной функции: ioctl(fd, command, arg); где fd — дескриптор файла, возвращаемый предварительно вызванной функцией open, command — действие (команда), которое необходимо выполнить драйверу, arg — параметр команды (может быть указателем на структуру). Команды специфичны для различных драйверов; следовательно, каждый драйвер интерпретирует команды в соответствии со своими внутренними спецификациями, от команды, в свою очередь, зависит формат структуры данных, описываемой передаваемым параметром. Драйверы могут считывать структуру данных arg из пространства задачи в соответствии с предопределенным форматом или записывать установки устройства в пространство задачи по адресу указанной структуры. Например, наличие интерфейса, предоставляемого функцией ioctl, дает возможность пользователям устанавливать для терминала скорость передачи информации в бодах, перематывать магнитную ленту, и, наконец, выполнять сетевые операции, задавая номера виртуальных каналов и сетевые адреса. 10.1.2.6 Другие функции, имеющие отношение к файловой системеТакие функции работы с файловой системой, как stat и chmod, выполняются одинаково, как для обычных файлов, так и для устройств; они манипулируют с индексом, не обращаясь к драйверу. Даже системная функция lseek работает для устройств. Например, если процесс подводит головку на лентопротяжном устройстве к указанному адресу смещения в байтах с помощью функции lseek, ядро корректирует смещение в таблице файлов но не выполняет никаких действий, специфичных для данного типа драйвера. Когда позднее процесс выполняет чтение (read) или запись (write), ядро пересылает адрес смещения из таблицы файлов в адресное пространство задачи, подобно тому, как это имеет место при работе с файлами обычного типа, и устройство физически перемещает головку к соответствующему смещению, указанному в пространстве задачи. Этот случай иллюстрируется на примере в разделе 10.3. 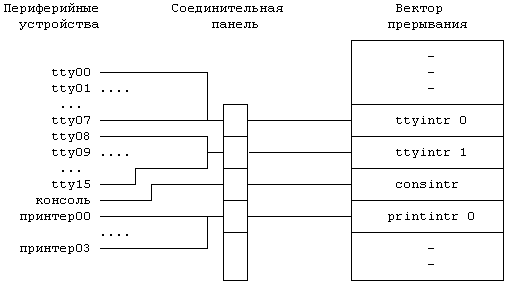 Рисунок 10.6. Прерывания от устройств 10.1.3 Программы обработки прерываний Как уже говорилось выше (раздел 6.4.1), возникновение прерывания побуждает ядро запускать программу обработки прерываний, в основе алгоритма которой лежит соотношение между устройством, вызвавшим прерывание, и смещением в таблице векторов прерываний. Ядро запускает программу обработки прерываний для данного типа устройства, передавая ей номер устройства или другие параметры для того, чтобы идентифицировать единицу устройства, вызвавшую прерывание. Например, в таблице векторов прерываний на Рисунке 10.6 показаны две точки входа для обработки прерываний от терминалов ("ttyintr"), каждая из которых используется для обработки прерываний, поступивших от 8 терминалов. Если устройство tty09 прервало работу системы, система вызывает программу обработки прерывания, ассоциированную с местом аппаратного подключения устройства. Поскольку с одной записью в таблице векторов прерываний может быть связано множество физических устройств, драйвер должен уметь распознавать устройство, вызвавшее прерывание. На рисунке записи в таблице векторов прерываний, соответствующие прерываниям от терминалов, имеют метки 0 и 1, чтобы система различала их между собой при вызове программы обработки прерываний, используя к примеру этот номер в качестве передаваемого программе параметра. Программа обработки прерываний использует этот номер и другую информацию, переданную механизмом прерывания, для того, чтобы удостовериться, что именно устройство tty09, а не tty12, прервало работу системы. Этот пример в упрощенном виде показывает то, что имеет место в реальных системах, где на самом деле существует несколько уровней контроллеров и соответствующих программ обработки прерываний, но он иллюстрирует общие принципы. Если подвести итог, можно сказать, что номер устройства, используемый программой обработки прерываний, идентифицирует единицу аппаратуры, а младший номер в файле устройства идентифицирует устройство для ядра. Драйвер устройства устанавливает соответствие между младшим номером устройства и номером единицы аппаратуры. 10.2 ДИСКОВЫЕ ДРАЙВЕРЫ Так сложилось исторически, что дисковые устройства в системах UNIX разбивались на разделы, содержащие различные файловые системы, что означало "деление [дискового] пакета на несколько управляемых по-своему частей" (см. [System V 84b]). Например, если на диске располагаются четыре файловые системы, администратор может оставить одну из них несмонтированной, одну смонтировать только для чтения, а две других только для записи. Несмотря на то, что все файловые системы сосуществуют на одном физическом устройстве, пользователи не могут ни обращаться к файлам немонтированной файловой системы, используя методы доступа, описанные в главах 4 и 5, ни записывать файлы в файловые системы, смонтированные только для чтения. Более того, так как каждый раздел (и, следовательно, файловая система) занимает на диске смежные дорожки и цилиндры, скопировать всю файловую систему легче, чем в том случае, если бы раздел занимал участки, разбросанные по всему дисковому тому. Дисковый драйвер транслирует адрес файловой системы, состоящий из логического номера устройства и номера блока, в точный номер дискового сектора. Драйвер получает адрес одним из следующих путей: либо стратегическая процедура использует буфер из буферного пула, заголовок которого содержит номера устройства и блока, либо процедуры чтения и записи передают логический (младший) номер устройства в качестве параметра; они преобразуют адрес смещения в байтах, хранящийся в пространстве задачи, в адрес соответствующего блока. Дисковый драйвер использует номер устройства для идентификации физического устройства и указания используемого раздела, обращаясь при этом к внутренним таблицам для поиска сектора, отмечающего начало раздела на диске. Наконец, он добавляет номер блока в файловой системе к номеру блока, с которого начинается каждый сектор, чтобы идентифицировать сектор, используемый для ввода-вывода. 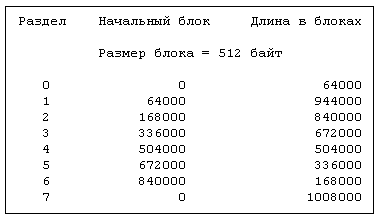 Рисунок 10.7. Разделы на диске RP07 Исторически сложилось так, что размеры дисковых разделов устанавливаются в зависимости от типа диска. Например, диск DEC RP07 разбит на разделы, характеристика которых приведена на Рисунке 10.7. Предположим, что файлы "/dev/dsk0", "/dev/dsk1", "/dev/dsk2" и "/dev/dsk3" соответствуют разделам диска RP07, имеющим номера от 0 до 3, и имеют аналогичные младшие номера. Пусть размер логического блока в файловой системе совпадает с размером дискового блока. Если ядро пытается обратиться к блоку с номером 940 в файловой системе, хранящейся в "/dev/dsk3", дисковый драйвер переадресует запрос к блоку с номером 336940 (раздел 3 начинается с блока, имеющего номер 336000; 336000 + 940 = 336940) на диске. Размеры разделов на диске варьируются и администраторы располагают файловые системы в разделах соответствующего размера: большие файловые системы попадают в разделы большего размера и т. д. Разделы на диске могут перекрываться. Например, разделы 0 и 1 на диске RP07 не пересекаются, но вместе они занимают блоки с номерами от 0 до 1008000, то есть весь диск. Раздел 7 так же занимает весь диск. Перекрытие разделов не имеет значения, поскольку файловые системы, хранящиеся в разделах, размещаются таким образом, что между ними нет пересечений. Иметь один раздел, включающий в себя все дисковое пространство, выгодно, поскольку весь том можно быстро скопировать. Использование разделов фиксированного состава и размера ограничивает гибкость дисковой конфигурации. Информацию о разделах в закодированном виде не следует включать в дисковый драйвер, но нужно поместить в таблицу содержимого дискового тома. Однако, найти общее место на всех дисках для размещения таблицы содержимого дискового тома и сохранить тем самым совместимость с предыдущими версиями системы довольно трудно. В существующих реализациях версии V предполагается, что блок начальной загрузки первой из файловых систем на диске занимает первый сектор тома, хотя по логике это, казалось бы, самое подходящее место для таблицы содержимого тома. И все же дисковый драйвер должен иметь закодированную информацию о месте расположения таблицы содержимого тома для каждого диска, не препятствуя существованию дисковых разделов переменного размера. В связи с тем, что для системы UNIX является типичным высокий уровень дискового трафика, драйвер диска должен максимизировать передачу данных с тем, чтобы обеспечить наилучшую производительность всей системы. Новейшие дисковые контроллеры осуществляют планирование выполнения заданий, требующих обращения к диску, позиционируют головку диска и обеспечивают передачу данных между диском и центральным процессором; иначе это приходится делать дисковому драйверу. Сервисные программы могут непосредственно обращаться к диску в обход стандартного метода доступа к файловой системе, рассмотренного в главах 4 и 5, как пользуясь блочным интерфейсом, так и не прибегая к структурированию данных. Непосредственно работают с диском две важные программы — mkfs и fsck. Программа mkfs форматирует раздел диска для файловой системы UNIX, создавая при этом суперблок, список индексов, список свободных дисковых блоков с указателями и корневой каталог новой файловой системы. Программа fsck проверяет целостность существующей файловой системы и исправляет ошибки, как показано в главе 5. Рассмотрим программу, приведенную на Рисунке 10.8, в применении к файлам "/dev/dsk15" и "/dev/rdsk15", и предположим, что команда ls выдала следующую информацию: ls -l /dev/dsk15 /dev/rdsk15 br-------- 2 root root 0,21 Feb 12 15:40 /dev/dsk15 crw-rw---- 2 root root 7,21 Mar 7 09:29 /dev/rdsk15 Отсюда видно, что файл "/dev/dsk15" соответствует устройству блочного типа, владельцем которого является пользователь под именем "root", и только пользователь "root" может читать с него непосредственно. Его старший номер 0, младший — 21. Файл "/dev/rdsk15" соответствует устройству посимвольного ввода-вывода, владельцем которого является пользователь "root", однако права доступа к которому на запись и чтение есть как у владельца, так и у группы. Его старший номер — 7, младший — 21. Процесс, открывающий файлы, получает доступ к устройству через таблицу ключей устройств ввода-вывода блоками и таблицу ключей устройств посимвольного ввода-вывода, соответственно, а младший номер устройства 21 информирует драйвер о том, к какому разделу диска производится обращение, например, дисковод 2, раздел 1. Поскольку младшие номера у файлов совпадают, они ссылаются на один и тот же раздел диска, если предположить, что это одно устройство[31]. Таким образом, процесс, выполняющий программу, открывает один и тот же драйвер дважды (используя различные интерфейсы), позиционирует головку к смещению с адресом 8192 и считывает данные с этого места. Результаты выполнения операций чтения должны быть идентичными при условии, что работает только одна файловая система. #include "fcntl.h" main() { char buf1[4096], buf2[4096]; int fd1, fd2, i; if (((fd1 = open("/dev/dsk5/", O_RDONLY)) == -1) || ((fd2 = open("/dev/rdsk5", O_RDONLY)) == -1)) { printf("ошибка при открытии\n"); exit(); } lseek(fd1, 8192L, 0); lseek(fd2, 8192L, 0); if ((read(fd1, buf1, sizeof(buf1)) == -1) || (read(fd2, buf2, sizeof(buf2)) == -1)) { printf("ошибка при чтении\n"); exit(); } for (i = 0; i ‹ sizeof(buf1); i++) if (buf1[i] != buf2[i]) { printf("различие в смещении %d\n", i); exit(); } printf("данные совпадают\n"); } Рисунок 10.8. Чтение данных с диска с использованием блочного интерфейса и без структурирования данных Программы, осуществляющие чтение и запись на диск непосредственно, представляют опасность, поскольку манипулируют с чувствительной информацией, рискуя нарушить системную защиту. Администраторам следует защищать интерфейсы ввода-вывода путем установки прав доступа к файлам дисковых устройств. Например, дисковые файлы "/dev/dsk15" и "/dev/rdsk15" должны принадлежать пользователю с именем "root", и права доступа к ним должны быть определены таким образом, чтобы пользователю "root" было разрешено чтение, а всем остальным пользователям и чтение, и запись должны быть запрещены. Программы, осуществляющие чтение и запись на диск непосредственно, могут также нарушить целостность данных в файловой системе. Алгоритмы файловой системы, рассмотренные в главах 3, 4 и 5, координируют выполнение операций ввода-вывода, связанных с диском, тем самым поддерживая целостность информационных структур на диске, в том числе списка свободных дисковых блоков и указателей из индексов на информационные блоки прямой и косвенной адресации. Процессы, обращающиеся к диску непосредственно, обходят эти алгоритмы. Пусть даже их программы написаны с большой осторожностью, проблема целостности все равно не исчезнет, если они выполняются параллельно с работой другой файловой системы. По этой причине программа fsck не должна выполняться при наличии активной файловой системы. Два типа дискового интерфейса различаются между собой по использованию буферного кеша. При работе с блочным интерфейсом ядро пользуется тем же алгоритмом, что и для файлов обычного типа, исключение составляет тот момент, когда после преобразования адреса смещения логического байта в адрес смещения логического блока (см. алгоритм bmap в главе 4) оно трактует адрес смещения логического блока как физический номер блока в файловой системе. Затем, используя буферный кеш, ядро обращается к данным, и, в конечном итоге, к стратегическому интерфейсу драйвера. Однако, при обращении к диску через символьный интерфейс (без структурирования данных), ядро не превращает адрес смещения в адрес файла, а передает его немедленно драйверу, используя для передачи рабочее пространство задачи. Процедуры чтения и записи, входящие в состав драйвера, преобразуют смещение в байтах в смещение в блоках и копируют данные непосредственно в адресное пространство задачи, минуя буферы ядра. Таким образом, если один процесс записывает на устройство блочного типа, а второй процесс затем считывает с устройства символьного типа по тому же адресу, второй процесс может не считать информацию, записанную первым процессом, так как информация может еще находиться в буферном кеше, а не на диске. Тем не менее, если второй процесс обратится к устройству блочного типа, он автоматически попадет на новые данные, находящиеся в буферном кеше. При использовании символьного интерфейса можно столкнуться со странной ситуацией. Если процесс читает или пишет на устройство посимвольного ввода-вывода порциями меньшего размера, чем, к примеру, блок, результаты будут зависеть от драйвера. Например, если производить запись на ленту по 1 байту, каждый байт может попасть в любой из ленточных блоков. Преимущество использования символьного интерфейса состоит в скорости, если не возникает необходимость в кешировании данных для дальнейшей работы. Процессы, обращающиеся к устройствам ввода — вывода блоками, передают информацию блоками, размер каждого из которых ограничивается размером логического блока в данной файловой системе. Например, если размер логического блока в файловой системе 1 Кбайт, за одну операцию ввода-вывода может быть передано не больше 1 Кбайта информации. При этом процессы, обращающиеся к диску с помощью символьного интерфейса, могут передавать за одну дисковую операцию множество дисковых блоков, в зависимости от возможностей дискового контроллера. С функциональной точки зрения, процесс получает тот же самый результат, но символьный интерфейс может работать гораздо быстрее. Если воспользоваться примером, приведенным на Рисунке 10.8, можно увидеть, что когда процесс считывает 4096 байт, используя блочный интерфейс для файловой системы с размером блока 1 Кбайт, ядро производит четыре внутренние итерации, на каждом шаге обращаясь к диску, прежде чем вызванная системная функция возвращает управление, но когда процесс использует символьный интерфейс, драйвер может закончить чтение за одну дисковую операцию. Более того, использование блочного интерфейса вызывает дополнительное копирование данных между адресным пространством задачи и буферами ядра, что отсутствует в символьном интерфейсе. 10.3 ТЕРМИНАЛЬНЫЕ ДРАЙВЕРЫТерминальные драйверы выполняют ту же функцию, что и остальные драйверы: управление передачей данных от и на терминалы. Однако, терминалы имеют одну особенность, связанную с тем, что они обеспечивают интерфейс пользователя с системой. Обеспечивая интерактивное использование системы UNIX, терминальные драйверы имеют свой внутренний интерфейс с модулями, интерпретирующими ввод и вывод строк. В каноническом режиме интерпретаторы строк преобразуют неструктурированные последовательности данных, введенные с клавиатуры, в каноническую форму (то есть в форму, соответствующую тому, что пользователь имел ввиду на самом деле) прежде, чем послать эти данные принимающему процессу; строковый интерфейс также преобразует неструктурированные последовательности выходных данных, созданных процессом, в формат, необходимый пользователю. В режиме без обработки строковый интерфейс передает данные между процессами и терминалом без каких-либо преобразований. Программисты, например, работают на клавиатуре терминала довольно быстро, но с ошибками. На этот случай терминалы имеют клавишу стирания ("erase"; клавиша может быть обозначена таким образом), чтобы пользователь имел возможность стирать часть введенной строки и вводить коррективы. Терминалы пересылают машине всю введенную последовательность, включая и символы стирания[32]. В каноническом режиме строковый интерфейс буферизует информацию в строки (набор символов, заканчивающийся символом возврата каретки[33]) и процессы стирают символы у себя, прежде чем переслать исправленную последовательность считывающему процессу. В функции строкового интерфейса входят: • построчный разбор введенных последовательностей; • обработка символов стирания; • обработка символов "удаления", отменяющих все остальные символы, введенные до того в текущей строке; • отображение символов, полученных терминалом; • расширение выходных данных, например, преобразование символов табуляции в последовательности пробелов; • сигнализирование процессам о зависании терминалов и прерывании строк или в ответ на нажатие пользователем клавиши удаления; • предоставление возможности не обрабатывать специальные символы, такие как символы стирания, удаления и возврата каретки. Функционирование без обработки подразумевает использование асинхронного терминала, поскольку процессы могут считывать символы в том виде, в каком они были введены, вместо того, чтобы ждать, когда пользователь нажмет клавишу ввода или возврата каретки. Ричи отметил, что первые строковые интерфейсы, используемые еще при разработке системы в начале 70-х годов, работали в составе программ командного процессора и редактора, но не в ядре (см. [Ritchie 84], стр.1580). Однако, поскольку в их функциях нуждается множество программ, их место в составе ядра. Несмотря на то, что строковый интерфейс выполняет такие функции, из которых логически вытекает его место между терминальным драйвером и остальной частью ядра, ядро не запускает строковый интерфейс иначе, чем через терминальный драйвер. На Рисунке 10.9 показаны поток данных, проходящий через терминальный драйвер и строковый интерфейс, и соответствующие ему управляющие воздействия, проходящие через терминальный драйвер. Пользователи могут указать, какой строковый интерфейс используется посредством вызова системной функции ioctl, но реализовать схему, по которой одно устройство использовало бы несколько строковых интерфейсов одновременно, при чем каждый интерфейсный модуль, в свою очередь, успешно вызывал бы следующий модуль для обработки данных, довольно трудно. 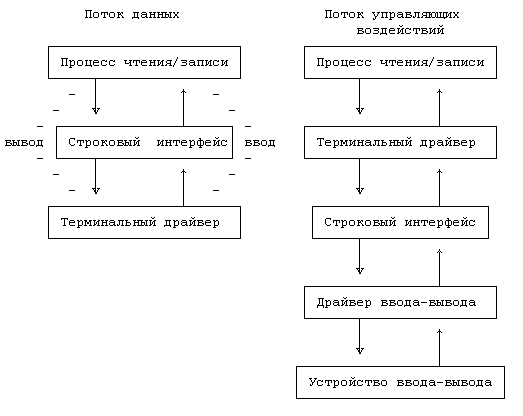 Рисунок 10.9. Последовательность обращений и поток данных через строковый интерфейс 10.3.1 Символьные спискиСтроковый интерфейс обрабатывает данные в символьных списках. Символьный список (clist) представляет собой переменной длины список символьных блоков с использованием указателей и с подсчетом количества символов в списке. Символьный блок (cblock) содержит указатель на следующий блок в списке, небольшой массив хранимой в символьном виде информации и адреса смещений, показывающие место расположения внутри блока корректной информации (Рисунок 10.10). Смещение до начала показывает первую позицию расположения корректной информации в массиве, смещение до конца показывает первую позицию расположения некорректной информации. 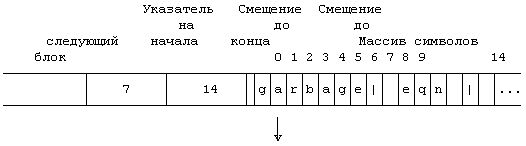 Рисунок 10.10. Символьный блок Ядро обеспечивает ведение списка свободных символьных блоков и выполняет над символьными списками и символьными блоками шесть операций. 1. Ядро назначает драйверу символьный блок из списка свободных символьных блоков. 2. Оно также возвращает символьный блок в список свободных символьных блоков. 3. Ядро может выбирать первый символ из символьного списка: оно удаляет первый символ из первого символьного блока в списке и устанавливает значения счетчика символов в списке и указателей в блоке таким образом, чтобы последующие операции не выбирали один и тот же символ. Если в результате операции выбран последний символ блока, ядро помещает в список свободных символьных блоков пустой блок и переустанавливает указатели в символьном списке. Если в символьном списке отсутствуют символы, ядро возвращает пустой символ. 4. Ядро может поместить символ в конец символьного списка путем поиска последнего символьного блока в списке, включения символа в него и переустановки адресов смещений. Если символьный блок заполнен, ядро выделяет новый символьный блок, включает его в конец символьного списка и помещает символ в новый блок. 5. Ядро может удалять от начала списка группу символов по одному блоку за одну операцию, что эквивалентно удалению всех символов в блоке за один раз. 6. Ядро может поместить блок с символами в конец символьного списка. Символьные списки позволяют создать несложный механизм буферизации, полезный при небольшом объеме передаваемых данных, типичном для медленных устройств, таких как терминалы. Они дают возможность манипулировать с данными с каждым символом в отдельности и с группой символьных блоков. Например, Рисунок 10.11 иллюстрирует удаление символов из символьного списка; ядро удаляет по одному символу из первого блока в списке (Рисунок 10.11а-в) до тех пор, пока в блоке не останется ни одного символа (Рисунок 10.11 г); затем оно устанавливает указатель списка на следующий блок, который становится первым блоком в списке. Подобно этому на Рисунке 10.12 показано, как ядро включает символы в символьный список; при этом предполагается, что в одном блоке помещается до 8 символов и что ядро размещает новый блок в конце списка (Рисунок 10.12 г). Рисунок 10.11. Удаление символов из символьного списка 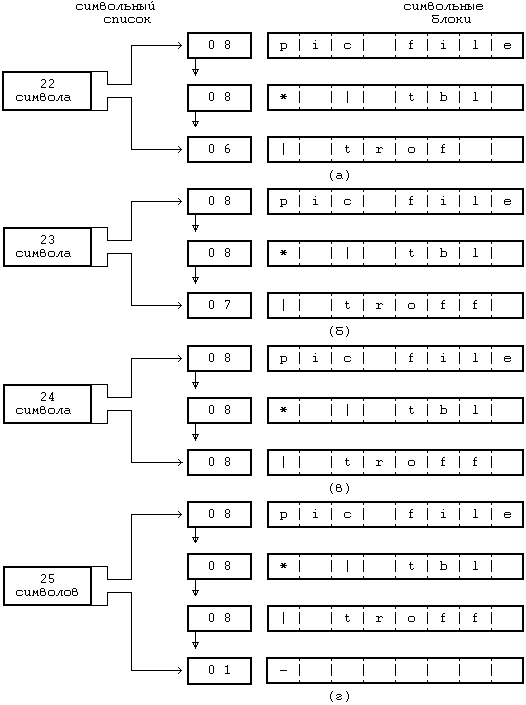 Рисунок 10.12. Включение символов в символьный список 10.3.2 Терминальный драйвер в каноническом режимеСтруктуры данных, с которыми работают терминальные драйверы, связаны с тремя символьными списками: списком для хранения данных, выводимых на терминал, списком для хранения неструктурированных вводных данных, поступивших в результате выполнения программы обработки прерывания от терминала, вызванного попыткой пользователя ввести данные с клавиатуры, и списком для хранения обработанных входных данных, поступивших в результате преобразования строковым интерфейсом специальных символов (таких как символы стирания и удаления) в неструктурированном списке. Когда процесс ведет запись на терминал (Рисунок 10.13), терминальный драйвер запускает строковый интерфейс. Строковый интерфейс в цикле считывает символы из адресного пространства процесса и помещает их в символьный список для хранения выводных данных до тех пор, пока поток данных не будет исчерпан. Строковый интерфейс обрабатывает выводимые символы, например, заменяя символы табуляции на последовательности пробелов. Если количество символов в списке для хранения выводных данных превысит верхнюю отметку, строковый интерфейс вызывает процедуры драйвера, пересылающие данные из символьного списка на терминал и после этого приостанавливающие выполнение процесса, ведущего запись. Когда объем информации в списке для хранения выводных данных падает за нижнюю отметку, программа обработки прерываний возобновляет выполнение всех процессов, приостановленных до того момента, когда терминал сможет принять следующую порцию данных. Строковый интерфейс завершает цикл обработки, скопировав всю выводимую информацию из адресного пространства задачи в соответствующий символьный список, и вызывает выполнение процедур драйвера, пересылающих данные на терминал, о которых уже было сказано выше. алгоритм terminal_write { do while(из пространства задачи еще поступают данные) { if (на терминал поступает информация) { приступить к выполнению операции записи данных из списка, хранящего выводные данные; приостановиться (до того момента, когда терминал будет готов принять следующую порцию данных); continue; /* возврат к началу цикла */ } скопировать данные в объеме символьного блока из пространства задачи в список, хранящий выводные данные: строковый интерфейс преобразует символы табуляции и т. д.; } приступить к выполнению операции записи данных из списка, хранящего выводные данные; } Рисунок 10.13. Алгоритм переписи данных на терминал 'Если на терминал ведут запись несколько процессов, они независимо друг от друга следуют указанной процедуре. Выводимая информация может быть искажена; то есть на терминале данные, записываемые процессами, могут пересекаться. Это может произойти из-за того, что процессы ведут запись на терминал, используя несколько вызовов системной функции write. Ядро может переключать контекст, пока процесс выполняется в режиме задачи, между последовательными вызовами функции write, и вновь запущенные процессы могут вести запись на терминал, пока первый из процессов приостановлен. Выводимые данные могут быть также искажены и на терминале, поскольку процесс может приостановиться на середине выполнения системной функции write, ожидая завершения вывода на терминал из системы предыдущей порции данных. Ядро может запустить другие процессы, которые вели запись на терминал до того, как первый процесс был повторно запущен. По этой причине, ядро не гарантирует, что содержимое буфера данных, выводимое в результате вызова системной функции write, появится на экране терминала в непрерывном виде. char form[]="это пример вывода строки из порожденного процесса"; main() { char output[128]; int i; for (i = 0; i ‹ 18; i++) { switch (fork()) { case -1: /* ошибка — превышено максимальное число процессов */ exit(); default: /* родительский процесс */ break; case 0: /* порожденный процесс */ /* формат вывода строки в переменной output */ sprintf(output, "%%d\n%s%d\n", form, i, form, i); for (;;) write(1, output, sizeof(output)); } } } Рисунок 10.14. Передача данных через стандартный вывод Рассмотрим программу, приведенную на Рисунке 10.14. Родительский процесс создает до 18 порожденных процессов; каждый из порожденных процессов записывает строку (с помощью библиотечной функции sprintf) в массив output, который включает сообщение и значение счетчика i в момент выполнения функции fork, и затем входит в цикл пошаговой переписи строки в файл стандартного вывода. Если стандартным выводом является терминал, терминальный драйвер регулирует поток поступающих данных. Выводимая строка имеет более 64 символов в длину, то есть слишком велика для того, чтобы поместиться в символьном блоке (длиной 64 байта) в версии V системы. Следовательно, терминальному драйверу требуется более одного символьного блока для каждого вызова функции write, иначе выводной поток может стать искаженным. Например, следующие строки были частью выводного потока, полученного в результате выполнения программы на машине AT&T 3B20: this is a sample output string from child 1 this is a sample outthis is a sample output string from child 0 Чтение данных с терминала в каноническом режиме более сложная операция. В вызове системной функции read указывается количество байт, которые процесс хочет считать, но строковый интерфейс выполняет чтение по получении символа перевода каретки, даже если количество символов не указано. Это удобно с практической точки зрения, так как процесс не в состоянии предугадать, сколько символов пользователь введет с клавиатуры, и, с другой стороны, не имеет смысла ждать, когда пользователь введет большое число символов. Например, пользователи вводят командные строки для командного процессора shell и ожидают ответа shell'а на команду по получении символа возврата каретки. При этом нет никакой разницы, являются ли введенные строки простыми командами, такими как "date" или "who", или же это более сложные последовательности команд, подобные следующей: pic file* | tbl | eqn | troff -mm -Taps | apsend Терминальный драйвер и строковый интерфейс ничего не знают о синтаксисе командного процессора shell, и это правильно, поскольку другие программы, которые считывают информацию с терминалов (например, редакторы), имеют различный синтаксис команд. Поэтому строковый интерфейс выполняет чтение по получении символа возврата каретки. На Рисунке 10.15 показан алгоритм чтения с терминала. Предположим, что терминал работает в каноническом режиме; в разделе 10.3.3 будет рассмотрена работа в режиме без обработки. Если в настоящий момент в любом из символьных списков для хранения вводной информации отсутствуют данные, процесс, выполняющий чтение, приостанавливается до поступления первой строки данных. Когда данные поступают, программа обработки прерывания от терминала запускает "программу обработки прерывания" строкового интерфейса, которая помещает данные в список для хранения неструктурированных вводных данных для передачи процессам, осуществляющим чтение, и в список для хранения выводных данных, передаваемых в качестве эхосопровождения на терминал. Если введенная строка содержит символ возврата каретки, программа обработки прерывания возобновляет выполнение всех приостановленных процессов чтения. Когда процесс, осуществляющий чтение, выполняется, драйвер выбирает символы из списка для хранения неструктурированных вводных данных, обрабатывает символы стирания и удаления и помещает символы в канонический символьный список. Затем он копирует строку символов в адресное пространство задачи до символа возврата каретки или до исчерпания числа символов, указанного в вызове системной функции read, что встретится раньше. Однако, процесс может обнаружить, что данных, ради которых он возобновил свое выполнение, больше не существует: другие процессы считали данные с терминала и удалили их из списка для неструктурированных вводных данных до того, как первый процесс был запущен вновь. Такая ситуация похожа на ту, которая имеет место, когда из канала считывают данные несколько процессов. алгоритм terminal_read { if (в каноническом символьном списке отсутствуют данные) { do while (в списке для неструктурированных вводных данных отсутствует информация) { if (терминал открыт с параметром "no delay" (без задержки)) return; if (терминал в режиме без обработки с использованием таймера и таймер не активен) предпринять действия к активизации таймера (таблица ответных сигналов); sleep (до поступления данных с терминала); } /* в списке для неструктурированных вводных данных есть информация */ if (терминал в режиме без обработки) скопировать все данные из списка для неструктурированных вводных данных в канонический список; else { /* терминал в каноническом режиме */ do while (в списке для неструктурированных вводных данных есть символы) { копировать по одному символу из списка для неструктурированных вводных данных в канонический список: выполнить обработку символов стирания и удаления; if (символ — "возврат каретки" или "конец файла") break ; /* выход из цикла */ } } } do while(в каноническом списке еще есть символы и не исчерпано количество символов, указанное в вызове функции read) копировать символы из символьных блоков канонического списка в адресное пространство задачи; } Рисунок 10.15. Алгоритм чтения с терминала Обработка символов в направлении ввода и в направлении вывода асимметрична, что видно из наличия двух символьных списков для ввода и одного — для вывода. Строковый интерфейс выводит данные из пространства задачи, обрабатывает их и помещает их в список для хранения выводных данных. Для симметрии следовало бы иметь только один список для вводных данных. Однако, в таком случае потребовалось бы использование программы обработки прерываний для интерпретации символов стирания и удаления, что сделало бы процедуру более сложной и длительной и запретило бы возникновение других прерываний на все критическое время. Использование двух символьных списков для ввода подразумевает, что программа обработки прерываний может просто сбросить символы в список для неструктурированных вводных данных и возобновить выполнение процесса, осуществляющего чтение, который собственно и возьмет на себя работу по интерпретации вводных данных. При этом программа обработки прерываний немедленно помещает введенные символы в список для хранения выводных данных, так что пользователь испытывает лишь минимальную задержку при просмотре введенных символов на терминале. char input[256]; main() { register int i; for (i = 0; i ‹ 18; i++) { switch (fork()) { case -1: /* ошибка */ printf("операция fork не выполнена из-за ошибки\n"); exit(); default: /* родительский процесс */ break; case 0: /* порожденный процесс */ for (;;) { read(0, input, 256); /* чтение строки */ printf("%d чтение %s\n",i,input); } } } } Рисунок 10.16. Конкуренция за данные, вводимые с терминала На Рисунке 10.16 приведена программа, в которой родительский процесс порождает несколько процессов, осуществляющих чтение из файла стандартного ввода, конкурируя за получение данных, вводимых с терминала. Ввод с терминала обычно осуществляется слишком медленно для того, чтобы удовлетворить все процессы, ведущие чтение, поэтому процессы большую часть времени находятся в приостановленном состоянии в соответствии с алгоритмом terminal_read, ожидая ввода данных. Когда пользователь вводит строку данных, программа обработки прерываний от терминала возобновляет выполнение всех процессов, ведущих чтение; поскольку они были приостановлены с одним и тем же уровнем приоритета, они выбираются для запуска с одинаковым уровнем приоритета. Пользователь не в состоянии предугадать, какой из процессов выполняется и считывает строку данных; успешно созданный процесс печатает значение переменной i в момент его создания. Все другие процессы в конце концов будут запущены, но вполне возможно, что они не обнаружат введенной информации в списках для хранения вводных данных и их выполнение снова будет приостановлено. Вся процедура повторяется для каждой введенной строки; нельзя дать гарантию, что ни один из процессов не захватит все введенные данные. Одновременному чтению с терминала несколькими процессами присуща неоднозначность, но ядро справляется с ситуацией наилучшим образом. С другой стороны, ядро обязано позволять процессам одновременно считывать данные с терминала, иначе порожденные командным процессором shell процессы, читающие из стандартного ввода, никогда не будут работать, поскольку shell тоже обращается к стандартному вводу. Короче говоря, процессы должны синхронизировать свои обращения к терминалу на пользовательском уровне. Когда пользователь вводит символ "конец файла" (Ctrl-d в ASCII), строковый интерфейс передает функции read введенную строку до символа конца файла, но не включая его. Он не передает данные (код возврата 0) функции read, если в символьном списке встретился только символ "конец файла"; вызывающий процесс сам распознает, что обнаружен конец файла и больше не следует считывать данные с терминала. Если еще раз обратиться к примерам программ по shell'у, приведенным в главе 7, можно отметить, что цикл работы shell'а завершается, когда пользователь нажимает ‹Ctrl-d›: функция read возвращает 0 и производится выход из shell'а. В этом разделе рассмотрена работа терминалов ввода-вывода, которые передают данные на машину по одному символу за одну операцию, в точности как пользователь их вводит с клавиатуры. Интеллектуальные терминалы подготавливают свой вводной поток на внешнем устройстве, освобождая центральный процессор для другой работы. Структура драйверов для таких терминалов походит на структуру драйверов для терминалов ввода-вывода, несмотря на то, что функции строкового интерфейса различаются в зависимости от возможностей внешних устройств. 10.3.3 Терминальный драйвер в режиме без обработки символов Пользователи устанавливают параметры терминала, такие как символы стирания и удаления, и извлекают значения текущих установок с помощью системной функции ioctl. Сходным образом они устанавливают необходимость эхо-сопровождения ввода данных с терминала, задают скорость передачи информации в бодах, заполняют очереди символов ввода и вывода или вручную запускают и останавливают выводной поток символов. В информационной структуре терминального драйвера хранятся различные управляющие установки (см. [SVID 85], стр.281), и строковый интерфейс получает параметры функции ioctl и устанавливает или считывает значения соответствующих полей структуры данных. Когда процесс устанавливает значения параметров терминала, он делает это для всех процессов, использующих терминал. Установки терминала не сбрасываются автоматически при выходе из процесса, сделавшего изменения в установках. Процессы могут также перевести терминал в режим без обработки символов, в котором строковый интерфейс передает символы в точном соответствии с тем, как пользователь ввел их: обработка вводного потока полностью отсутствует. Однако, ядро должно знать, когда выполнить вызванную пользователем системную функцию read, поскольку символ возврата каретки трактуется как обычный введенный символ. Оно выполняет функцию read после того, как с терминала будет введено минимальное число символов или по прохождении фиксированного промежутка времени от момента получения с терминала любого набора символов. В последнем случае ядро хронометрирует ввод символов с терминала, помещая записи в таблицу ответных сигналов (глава 8). Оба критерия (минимальное число символов и фиксированный промежуток времени) задаются в вызове функции ioctl. Когда соответствующие критерии удовлетворены, программа обработки прерываний строкового интерфейса возобновляет выполнение всех приостановленных процессов. Драйвер пересылает все символы из списка для хранения неструктурированных вводных данных в канонический список и выполняет запрос процесса на чтение, следуя тому же самому алгоритму, что и в случае работы в каноническом режиме. Режим без обработки символов особенно важен в экранно-ориентированных приложениях, таких как экранный редактор vi, многие из команд которого не заканчиваются символом возврата каретки. Например, команда dw удаляет слово в текущей позиции курсора. На Рисунке 10.17 приведена программа, использующая функцию ioctl для сохранения текущих установок терминала для файла с дескриптором 0, что соответствует значению дескриптора файла стандартного ввода. Функция ioctl с командой TCGETA приказывает драйверу извлечь установки и сохранить их в структуре с именем savetty в адресном пространстве задачи. Эта команда часто используется для того, чтобы определить, является ли файл терминалом или нет, поскольку она ничего не изменяет в системе: если она завершается неудачно, процессы предполагают, что файл не является терминалом. Здесь же, процесс вторично вызывает функцию ioctl для того, чтобы перевести терминал в режим без обработки: он отключает эхо-сопровождение ввода символов и готовится к выполнению операций чтения с терминала по получении с терминала 5 символов, как минимум, или по прохождении 10 секунд с момента ввода первой порции символов. Когда процесс получает сигнал о прерывании, он сбрасывает первоначальные параметры терминала и завершается. #include ‹signal.h› #include ‹termio.h› struct termio savetty; main() { extern sigcatch(); struct termio newtty; int nrd; char buf[32]; signal(SIGINT, sigcatch); if (ioctl(0, TCGETA, &savetty) == -1) { printf("ioctl завершилась неудачно: нет терминала\n"); exit(); } newtty = savetty; newtty.c_lflag &= ~ICANON; /* выход из канонического режима */ newtty.c_lflag &= ~ECHO; /* отключение эхо-сопровождения*/ newtty.c_cc[VMIN] = 5; /* минимум 5 символов */ newtty.c_cc[VTIME] = 100; /* интервал 10 секунд */ if (ioctl(0,TCSETAF, &newtty) == -1) { printf("не могу перевести тер-л в режим без обработки\n"); exit(); } for(;;) { nrd = read(0, buf, sizeof(buf)); buf[nrd] = 0; printf("чтение %d символов %s'\n", nrd, buf); } } sigcatch() { ioctl(0, TCSETAF, &savetty); exit(); } Рисунок 10.17. Режим без обработки — чтение 5-символьных блоков 10.3.4 Опрос терминала Иногда удобно производить опрос устройства, то есть считывать с него данные, если они есть, или продолжать выполнять обычную работу — в противном случае. Программа на Рисунке 10.18 иллюстрирует этот случай: после открытия терминала с параметром "no delay" (без задержки) процессы, ведущие чтение с него, не приостановят свое выполнение в случае отсутствия данных, а вернут управление немедленно (см. алгоритм terminal_read, Рисунок 10.15). Этот метод работает также, если процесс следит за множеством устройств: он может открыть каждое устройство с параметром "no delay" и опросить всех из них, ожидая поступления информации с каждого. Однако, этот метод растрачивает вычислительные мощности системы. #include ‹fcntl.h› main() { register int i, n; int fd; char buf[256] ; /* открытие терминала только для чтения с опцией "no delay" */ if ((fd = open("/dev/tty", O_RDONLYO_NDELAY)) == -1) exit(); n = 1; for(;;) { /* всегда */ for (i = 0; i ‹ n; i++); if (read(fd, buf, sizeof(buf)) › 0) { printf("чтение с номера %d\n", n); n--; } else n++; /* ничего не прочитано; возврат вследствие "no delay" */ } } Рисунок 10.18. Опрос терминала В системе BSD есть системная функция select, позволяющая производить опрос устройства. Синтаксис вызова этой функции: select(nfds, rfds, wfds, efds, timeout) где nfds — количество выбираемых дескрипторов файлов, а rfds, wfds и efds указывают на двоичные маски, которыми "выбирают" дескрипторы открытых файлов. То есть, бит 1 ‹‹ fd (сдвиг на 1 разряд влево значения дескриптора файла) соответствует установке на тот случай, если пользователю нужно выбрать этот дескриптор файла. Параметр timeout (тайм-аут) указывает, на какое время следует приостановить выполнение функции select, ожидая поступления данных, например; если данные поступают для любых дескрипторов и тайм-аут не закончился, select возвращает управление, указывая в двоичных масках, какие дескрипторы были выбраны. Например, если пользователь пожелал приостановиться до момента получения данных по дескрипторам 0, 1 или 2, параметр rfds укажет на двоичную маску 7; когда select возвратит управление, двоичная маска будет заменена маской, указывающей, по каким из дескрипторов имеются готовые данные. Двоичная маска wfds выполняет похожую функцию в отношении записи дескрипторов, а двоичная маска efds указывает на существование исключительных условий, связанных с конкретными дескрипторами, что бывает полезно при работе в сети. 10.3.5 Назначение операторского терминала Операторский терминал — это терминал, с которого пользователь регистрируется в системе, он управляет процессами, запущенными пользователем с терминала. Когда процесс открывает терминал, драйвер терминала открывает строковый интерфейс. Если процесс возглавляет группу процессов как результат выполнения системной функции setpgrp и если процесс не связан с одним из операторских терминалов, строковый интерфейс делает открываемый терминал операторским. Он сохраняет старший и младший номера устройства для файла терминала в адресном пространстве, выделенном процессу, а номер группы процессов, связанной с открываемым процессом, в структуре данных терминального драйвера. Открываемый процесс становится управляющим процессом, обычно входным (начальным) командным процессором, что мы увидим далее. Операторский терминал играет важную роль в обработке сигналов. Когда пользователь нажимает клавиши "delete" (удаления), "break" (прерывания), стирания или выхода, программа обработки прерываний загружает строковый интерфейс, который посылает соответствующий сигнал всем процессам в группе. Подобно этому, когда пользователь "зависает", программа обработки прерываний от терминала получает информацию о "зависании" от аппаратуры, и строковый интерфейс посылает соответствующий сигнал всем процессам в группе. Таким образом, все процессы, запущенные с конкретного терминала, получают сигнал о "зависании"; реакцией по умолчанию для большинства процессов будет выход из программы по получении сигнала; это похоже на то, как при завершении работы пользователя с терминалом из системы удаляются побочные процессы. После посылки сигнала о "зависании" программа обработки прерываний от терминала разъединяет терминал с группой процессов, чтобы процессы из этой группы не могли больше получать сигналы, возникающие на терминале. 10.3.6 Драйвер косвенного терминала Зачастую процессам необходимо прочитать ил записать данные непосредственно на операторский терминал, хотя стандартный ввод и вывод могут быть переназначены в другие файлы. Например, shell может посылать срочные сообщения непосредственно на терминал, несмотря на то, что его стандартный файл вывода и стандартный файл ошибок, возможно, переназначены в другое место. В версиях системы UNIX поддерживается "косвенный" доступ к терминалу через файл устройства "/dev/tty", в котором для каждого процесса определен управляющий (операторский) терминал. Пользователи, прошедшие регистрацию на отдельных терминалах, могут обращаться к файлу "/dev/tty", но они получат доступ к разным терминалам. Существует два основных способа поиска ядром операторского терминала по имени файла "/dev/tty". Во-первых, ядро может специально указать номер устройства для файла косвенного терминала с отдельной точкой входа в таблицу ключей устройств посимвольного ввода-вывода. При запуске косвенного терминала драйвер этого терминала получает старший и младший номера операторского терминала из адресного пространства, выделенного процессу, и запускает драйвер реального терминала, используя данные таблицы ключей устройств посимвольного ввода-вывода. Второй способ, обычно используемый для поиска операторского терминала по имени "/dev/tty", связан с проверкой соответствия старшего номера устройства номеру косвенного терминала перед вызовом процедуры open, определяемой типом данного драйвера. В случае совпадения номеров освобождается индекс файла "/dev/tty", выделяется индекс операторскому терминалу, точка входа в таблицу файлов переустанавливается так, чтобы указывать на индекс операторского терминала, и вызывается процедура open, принадлежащая терминальному драйверу. Дескриптор файла, возвращенный после открытия файла "/dev/tty", указывает непосредственно на операторский терминал и его драйвер. 10.3.7 Вход в систему Как показано в главе 7, процесс начальной загрузки, имеющий номер 1, выполняет бесконечный цикл чтения из файла "/etc/inittab" инструкций о том, что нужно делать, если загружаемая система определена как "однопользовательская" или "многопользовательская". В многопользовательском режиме самой первой обязанностью процесса начальной загрузки является предоставление пользователям возможности регистрироваться в системе с терминалов (Рисунок 10.19). Он порождает процессы, именуемые getty-процессами (от "get tty" — получить терминал), и следит за тем, какой из процессов открывает какой терминал; каждый getty-процесс устанавливает свою группу процессов, используя вызов системной функции setpgrp, открывает отдельную терминальную линию и обычно приостанавливается во время выполнения функции open до тех пор, пока машина не получит аппаратную связь с терминалом. Когда функция open возвращает управление, getty-процесс исполняет программу login (регистрации в системе), которая требует от пользователей, чтобы они идентифицировали себя указанием регистрационного имени и пароля. Если пользователь зарегистрировался успешно, программа login наконец запускает командный процессор shell и пользователь приступает к работе. Этот вызов shell'а именуется "login shell" (регистрационный shell, регистрационный интерпретатор команд). Процесс, связанный с shell'ом, имеет тот же идентификатор, что и начальный getty-процесс, поэтому login shell является процессом, возглавляющим группу процессов. Если пользователь не смог успешно зарегистрироваться, программа регистрации завершается через определенный промежуток времени, закрывая открытую терминальную линию, а процесс начальной загрузки порождает для этой линии следующий getty-процесс. Процесс начальной загрузки делает паузу до получения сигнала об окончании порожденного ранее процесса. После возобновления работы он выясняет, был ли прекративший существование процесс регистрационным shell'ом и если это так, порождает еще один getty-процесс, открывающий терминал, вместо прекратившего существование. алгоритм login /* процедура регистрации */ { исполняется getty-процесс: установить группу процессов (вызов функции setpgrp); открыть терминальную линию; /* приостанов до завершения открытия */ if (открытие завершилось успешно) { исполнить программу регистрации: запросить имя пользователя; отключить эхо-сопровождение, запросить пароль; if (регистрация прошла успешно) { /* найден соответствующий пароль в /etc/passwd */ перевести терминал в канонический режим (ioctl); исполнить shell; } в противном случае считать количество попыток регистрации, пытаться зарегистрироваться снова до достижения определенной точки; } } Рисунок 10.19. Алгоритм регистрации 10.4 ПОТОКИ Схема реализации драйверов устройств, хотя и отвечает заложенным требованиям, страдает некоторыми недостатками, которые с годами стали заметнее. Разные драйверы имеют тенденцию дублировать свои функции, в частности драйверы, которые реализуют сетевые протоколы и которые обычно включают в себя секцию управления устройством и секцию протокола. Несмотря на то, что секция протокола должна быть общей для всех сетевых устройств, на практике это не так, поскольку ядро не имеет адекватных механизмов для общего использования. Например, символьные списки могли бы быть полезными благодаря своим возможностям в буферизации, но они требуют больших затрат ресурсов на посимвольную обработку. Попытки обойти этот механизм, чтобы повысить производительность системы, привели к нарушению модульности подсистемы управления вводом-выводом. Отсутствие общности на уровне драйверов распространяется вплоть до уровня команд пользователя, на котором несколько команд могут выполнять общие логические функции, но различными средствами. Еще один недостаток построения драйверов заключается в том, что сетевые протоколы требуют использования средства, подобного строковому интерфейсу, в котором каждая дисциплина реализует одну из частей протокола и составные части соединяются гибким образом. Однако, соединить традиционные строковые интерфейсы довольно трудно. Ричи недавно разработал схему, получившую название "потоки" (streams), для повышения модульности и гибкости подсистемы управления вводом-выводом. Нижеследующее описание основывается на его работе [Ritchie 84b], хотя реализация этой схемы в версии V слегка отличается. Поток представляет собой полнодуплексную связь между процессом и драйвером устройства. Он состоит из совокупности линейно связанных между собой пар очередей, каждая из которых (пара) включает одну очередь для ввода и другую — для вывода. Когда процесс записывает данные в поток, ядро посылает данные в очереди для вывода; когда драйвер устройства получает входные данные, он пересылает их в очереди для ввода к процессу, производящему чтение. Очереди обмениваются сообщениями с соседними очередями, используя четко определенный интерфейс. Каждая пара очередей связана с одним из модулей ядра, таким как драйвер, строковый интерфейс или протокол, и модули ядра работают с данными, прошедшими через соответствующие очереди. Каждая очередь представляет собой структуру данных, состоящую из следующих элементов: • процедуры открытия, вызываемой во время выполнения системной функции open • процедуры закрытия, вызываемой во время выполнения системной функции close • процедуры "вывода", вызываемой для передачи сообщения в очередь • процедуры "обслуживания", вызываемой, когда очередь запланирована к исполнению • указателя на следующую очередь в потоке • указателя на список сообщений, ожидающих обслуживания • указателя на внутреннюю структуру данных, с помощью которой поддерживается рабочее состояние очереди • флагов, а также верхней и нижней отметок, используемых для управления потоками данных, диспетчеризации и поддержания рабочего состояния очереди. Ядро выделяет пары очередей, соседствующие в памяти; следовательно, очередь легко может отыскать своего партнера по паре. 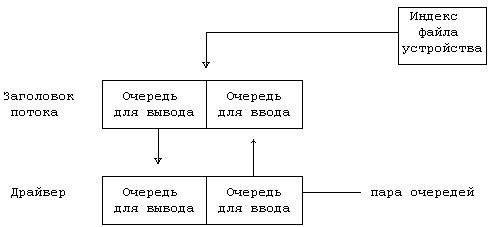 Рисунок 10.20. Поток после открытия Устройство с потоковым драйвером является устройством посимвольного ввода-вывода; оно имеет в таблице ключей устройств соответствующего типа специальное поле, которое указывает на структуру инициализации потока, содержащую адреса процедур, а также верхнюю и нижнюю отметки, упомянутые выше. Когда ядро выполняет системную функцию open и обнаруживает, что файл устройства имеет тип "специальный символьный", оно проверяет наличие нового поля в таблице ключей устройств посимвольного ввода-вывода. Если в таблице отсутствует соответствующая точка входа, то драйвер не является потоковым, и ядро выполняет процедуру, обычную для устройств посимвольного ввода-вывода. Однако, при первом же открытии потокового драйвера ядро выделяет две пары очередей одну для заголовка потока и другую для драйвера. У всех открытых потоков модуль заголовка имеет идентичную структуру: он содержит общую процедуру "вывода" и общую процедуру "обслуживания" и имеет интерфейс с модулями ядра более высокого уровня, выполняющими функции read, write и ioctl. Ядро инициализирует структуру очередей драйвера, назначая значения указателям каждой очереди и копируя адреса процедур драйвера из структуры инициализации драйвера, и запускает процедуру открытия. Процедура открытия драйвера выполняет обычную инициализацию, но при этом сохраняет информацию, необходимую для повторного обращения к ассоциированной с этой процедурой очереди. Наконец, ядро отводит специальный указатель в копии индекса в памяти для ссылки на заголовок потока (Рисунок 10.20). Когда еще один процесс открывает устройство, ядро обнаруживает назначенный ранее поток с помощью этого указателя и запускает процедуру открытия для всех модулей потока. Модули поддерживают связь со своими соседями по потоку путем передачи сообщений. Сообщение состоит из списка заголовков блоков, содержащих информацию сообщения; каждый заголовок блока содержит ссылку на место расположения начала и конца информации блока. Существует два типа сообщений — управляющее и информационное, которые определяются указателями типа в заголовке сообщения. Управляющие сообщения могут быть результатом выполнения системной функции ioctl или результатом особых условий, таких как зависание терминала, а информационные сообщения могут возникать в результате выполнения системной функции write или в результате поступления данных от устройства. 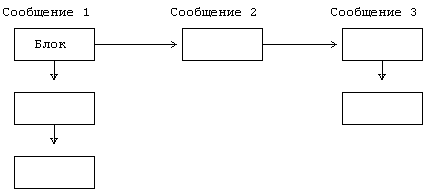 Рисунок 10.21. Сообщения в потоках Когда процесс производит запись в поток, ядро копирует данные из адресного пространства задачи в блоки сообщения, которые выделяются модулем заголовка потока. Модуль заголовка потока запускает процедуру "вывода" для модуля следующей очереди, которая обрабатывает сообщение, незамедлительно передает его в следующую очередь или ставит в эту же очередь для последующей обработки. В последнем случае модуль связывает заголовки блоков сообщения в список с указателями, формируя двунаправленный список (Рисунок 10.21). Затем он устанавливает в структуре данных очереди флаг, показывая тем самым, что имеются данные для обработки, и планирует собственное обслуживание. Модуль включает очередь в список очередей, требующих обслуживания и запускает механизм диспетчеризации; планировщик (диспетчер) вызывает процедуры обслуживания для каждой очереди в списке. Ядро может планировать обслуживание модулей по программному прерыванию, подобно тому, как оно вызывает функции в таблице ответных сигналов (см. главу 8); обработчик программных прерываний вызывает индивидуальные процедуры обслуживания. 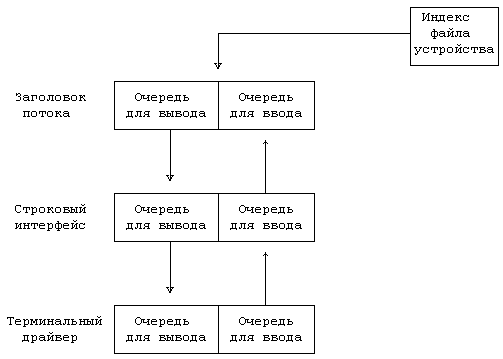 Рисунок 10.22. Продвижение модуля к потоку Процессы могут "продвигать" модули к открытому потоку, используя вызов системной функции ioctl. Ядро помещает выдвинутый модуль сразу под заголовком потока и связывает указатели очереди таким образом, чтобы сохранить двунаправленную структуру списка. Модули, расположенные в потоке ниже, не беспокоятся о том, связаны ли они с заголовком потока или же с выдвинутым модулем: интерфейсом выступает процедура "вывода" следующей очереди в потоке; а следующая очередь принадлежит только что выдвинутому модулю. Например, процесс может выдвинуть модуль строкового интерфейса в поток терминального драйвера с целью обработки символов стирания и удаления (Рисунок 10.22); модуль строкового интерфейса не имеет тех же составляющих, что и строковые интерфейсы, рассмотренные в разделе 10.3, но выполняет те же функции. Без модуля строкового интерфейса терминальный драйвер не обработает вводные символы и они поступят в заголовок потока в неизмененном виде. Сегмент программы, открывающий терминал и выдвигающий строковый интерфейс, может выглядеть следующим образом: fd = open("/dev/ttyxy", O_RDWR); ioctl(fd, PUSH, TTYLD); где PUSH — имя команды, а TTYLD — число, идентифицирующее модуль строкового интерфейса. Не существует ограничения на количество модулей, могущих быть выдвинутыми в поток. Процесс может выталкивать модули из потока в порядке поступления, "первым пришел — первым вышел", используя еще один вызов системной функции ioctl ioctl(fd, POP, 0); При том, что модуль строкового интерфейса выполняет обычные функции по управлению терминалом, соответствующее ему устройство может быть средством сетевой связи вместо того, чтобы обеспечивать связь с одним-единственным терминалом. Модуль строкового интерфейса работает одинаково, независимо от того, какого типа модуль расположен ниже него. Этот пример наглядно демонстрирует повышение гибкости вследствие соединения модулей ядра. 10.4.1 Более детальное рассмотрение потоков Пайк описывает реализацию мультиплексных виртуальных терминалов, использующую потоки (см. [Pike 84]). Пользователь видит несколько виртуальных терминалов, каждый из которых занимает отдельное окно на экране физического терминала. Хотя в статье Пайка рассматривается схема для интеллектуальных графических терминалов, она работала бы и для терминалов ввода-вывода тоже; каждое окно занимало бы целый экран и пользователь для переключения виртуальных окон набирал бы последовательность управляющих клавиш. 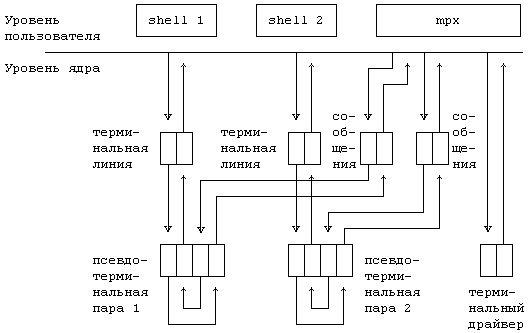 Рисунок 10.23. Отображение виртуальных окон на экране физического терминала На Рисунке 10.23 показана схема расположения процессов и модулей ядра. Пользователь вызывает процесс mpx, контролирующий работу физического терминала. Mpx читает данные из линии физического терминала и ждет объявления об управляющих событиях, таких как создание нового окна, переключение управления на другое окно, удаление окна и т. п. Когда mpx получает уведомление о том, что пользователю нужно создать новое окно, он создает процесс, управляющий новым окном, и поддерживает связь с ним через псевдотерминал. Псевдотерминал — это программное устройство, работающее по принципу пары: выходные данные, направляемые к одной составляющей пары, посылаются на вход другой составляющей; входные данные посылаются тому модулю потока, который расположен выше по течению. Для того, чтобы открыть окно (Рисунок 10.24), mpx назначает псевдотерминальную пару и открывает одну из составляющих пары, направляя поток к ней (открытие драйвера служит гарантией того, что псевдотерминальная пара не была выбрана раньше). Mpx ветвится и новый процесс открывает другую составляющую псевдотерминальной пары. Mpx выдвигает модуль управления сообщениями в псевдотерминальный поток, чтобы преобразовывать управляющие сообщения в информационные (об этом в следующем параграфе), а порожденный процесс помещает в псевдотерминальный поток модуль строкового интерфейса перед запуском shell'а. Этот shell теперь выполняется на виртуальном терминале; для пользователя виртуальный терминал неотличим от физического. /* предположим, что дескрипторы файлов 0 и 1 уже относятся к физическому терминалу */ for (;;) { /* цикл */ выбрать(ввод); /* ждать ввода из какой-либо линии */ прочитать данные, введенные из линии; переключить(линию с вводимыми данными) { если выбран физический терминал: /* данные вводятся по линии физического терминала */ if (считана управляющая команда) { /* например, создание нового окна */ открыть свободный псевдотерминал; пойти по ветви нового процесса: if (процесс родительский) { выдвинуть интерфейс сообщений в сторону mpx; continue; /* возврат в цикл "для" */ } /* процесс-потомок */ закрыть ненужные дескрипторы файлов; открыть другой псевдотерминал из пары, выбрать stdin, stdout, stderr; выдвинуть строковый интерфейс терминала; запустить shell; /* подобно виртуальному терминалу */ } /* "обычные" данные, появившиеся через виртуальный терминал */ демультиплексировать считывание данных с физического терминала, снять заголовки и вести запись на соответствующий псевдотерминал; continue; /* возврат в цикл "для" */ если выбран логический терминал: /* виртуальный терминал связан с окном */ закодировать заголовок, указывающий назначение информации окна; переписать заголовок и информацию на физический терминал; continue; /* возврат в цикл "для" */ } } Рисунок 10.24. Псевдопрограмма мультиплексирования окон Процесс mpx является мультиплексором, направляющим вывод данных с виртуальных терминалов на физический терминал и демультиплексирующим ввод данных с физического терминала на подходящий виртуальный. Mpx ждет поступления данных по любой из линий, используя системную функцию select. Когда данные поступают от физического терминала, mpx решает вопрос, являются ли поступившие данные управляющим сообщением, извещающим о необходимости создания нового окна или удаления старого, или же это информационное сообщение, которое необходимо разослать процессам, считывающим информацию с виртуального терминала. В последнем случае данные имеют заголовок, идентифицирующий тот виртуальный терминал, к которому они относятся; mpx стирает заголовок с сообщения и переписывает данные в соответствующий псевдотерминальный поток. Драйвер псевдотерминала отправляет данные через строковый интерфейс терминала процессам, осуществляющим чтение. Обратная процедура имеет место, когда процесс ведет запись на виртуальный терминал; mpx присоединяет заголовок к данным, информируя физический терминал, для вывода в какое из окон предназначены эти данные. Если процесс вызывает функцию ioctl с виртуального терминала, строковый интерфейс терминала задает необходимые установки терминала для его виртуальной линии; для каждого из виртуальных терминалов установки могут быть различными. Однако, на физический терминал должна быть послана и кое-какая информация, зависящая от типа устройства. Модуль управления сообщениями преобразует управляющие сообщения, генерируемые функцией ioctl, в информационные сообщения, предназначенные для чтения и записи их процессом mpx, и эти сообщения передаются на физическое устройство. 10.4.2 Анализ потоков Ричи упоминает о том, что им была предпринята попытка создания потоков только с процедурами "вывода" или только с процедурами обслуживания. Однако, процедура обслуживания необходима для управления потоками данных, так как модули должны иногда ставить данные в очередь, если соседние модули на время закрыты для приема данных. Процедура "вывода" так же необходима, поскольку данные должны иногда доставляться в соседние модули незамедлительно. Например, строковому интерфейсу терминала нужно вести эхо-сопровождение ввода данных на терминале в темпе с процессом. Системная функция write могла бы запускать процедуру "вывода" для следующей очереди непосредственно, та, в свою очередь, вызывала бы процедуру "вывода" для следующей очереди и так далее, не нуждаясь в механизме диспетчеризации. Процесс приостановился бы в случае переполнения очередей для вывода. Однако, со стороны ввода модули не могут приостанавливаться, поскольку их выполнение вызывается программой обработки прерываний, иначе был бы приостановлен совершенно безобидный процесс. Связь между модулями не должна быть симметричной в направлениях ввода и вывода, хотя это и делает схему менее изящной. Также было бы желательно реализовать каждый модуль в виде отдельного процесса, но использование большого количества модулей привело бы к переполнению таблицы процессов. Модули наделяются специальным механизмом диспетчеризации — программным прерыванием, независимым от обычного планировщика процессов. По этой причине модули не могут приостанавливать свое выполнение, так как они приостанавливали бы тем самым произвольный процесс (тот, который прерван). Модули должны хранить внутри себя информацию о своем состоянии, что делает лежащие в их основе программы более громоздкими, чем если бы приостановка выполнения была разрешена. В реализации потоков можно выделить несколько отклонений или несоответствий: • Учет ресурсов процесса в потоках затрудняется, поскольку модулям необязательно выполняться в контексте процесса, использующего поток. Ошибочно предполагать, что все процессы одинаково используют модули потоков, поскольку одним процессам может потребоваться использование сложных сетевых протоколов, тогда как другие могут использовать простые строковые интерфейсы. • Пользователи имеют возможность переводить терминальный драйвер в режим без обработки, в котором функция read возвращает управление через короткий промежуток времени в случае отсутствия данных (например, если newtty.c_cc[VMIN] = 0 на Рисунке 10.17). Эту особенность сложно реализовать в потоковой среде без подключения специальной программы на уровне заголовка потока. • Потоки выступают средствами линейной связи и не могут позволить производить с легкостью мультиплексирование на уровне ядра. В примере использования окон, рассмотренном в предыдущем разделе, выполнялось мультиплексирование на уровне пользовательского процесса. Несмотря на эти несоответствия, с потоками связываются большие надежды в совершенствовании разработки модулей драйвера. 10.5 ВЫВОДЫ Данная глава представляет собой обзор драйверов устройств в системе UNIX. Устройства могут быть либо блочного, либо символьного типа; интерфейс между устройствами и остальной частью ядра определяется типом устройств. Интерфейсом для устройств блочного типа выступает таблица ключей устройств ввода-вывода блоками, состоящая из точек входа, соответствующих процедурам открытия и закрытия устройств и стратегической процедуре. Стратегическая процедура управляет передачей данных от и к устройству блочного типа. Интерфейсом для устройств символьного типа выступает таблица ключей устройств посимвольного ввода-вывода, которая состоит из точек входа, соответствующих процедурам открытия и закрытия устройства, чтения, записи и процедуре ioctl. Системная функция ioctl использует при обращении к устройствам символьного типа свой собственный интерфейс, который позволяет осуществлять передачу управляющей информации между процессами и устройствами. По получении прерывания от устройства ядро вызывает программу обработки соответствующего прерывания, опираясь на информацию, хранящуюся в таблице векторов прерываний, и на параметры, сообщенные устройством, от которого поступило прерывание. Дисковые драйверы превращают номера логических блоков, используемые файловой системой, в физические адреса на диске. Блочный интерфейс дает возможность ядру буферизовать данные. Взаимодействие без обработки ускоряет ввод-вывод на диск, но игнорирует буферный кеш, увеличивая тем самым шансы разрушить файловую систему. Терминальные драйверы осуществляют непосредственное взаимодействие с пользователями. Ядро связывает с каждым терминалом три символьных списка, один для неструктурированного ввода с клавиатуры, один для ввода с обработкой символов стирания, удаления и возврата каретки и один для вывода. Системная функция ioctl дает процессам возможность следить за тем, как ядро обрабатывает вводимые данные, переводя терминал в канонический режим или устанавливая значения различных параметров для режима без обработки символов. Getty-процесс открывает терминальные линии и ждет связи: он формирует группу процессов во главе с регистрационным shell'ом, инициализирует с помощью функции ioctl параметры терминала и обращается к пользователю с предложением зарегистрироваться. Установленный таким образом операторский терминал посылает процессам в группе сигналы в ответ на возникновение таких событий, как "зависание" пользователя или нажатие им клавиши прерывания. Потоки выступают средством повышения модульности построения драйверов устройств и протоколов. Поток — это полнодуплексная связь между процессами и драйверами устройств, которая может включать в себя строковые интерфейсы и протоколы для промежуточной обработки данных. Модули потоков характеризуются четко определенным взаимодействием и гибкостью, позволяющей использовать их в сочетании с другими модулями. Эта гибкость имеет особое значение для сетевых протоколов и драйверов. 10.6 УПРАЖНЕНИЯ 1. * Предположим, что в системе имеются два файла устройств с одними и теми же старшим и младшим номерами, при том, что оба устройства — символьного типа. Если два процесса желают одновременно открыть физическое устройство, не будет никакой разницы, открывают ли они один и тот же файл устройства или же разные файлы. Что произойдет, когда они станут закрывать устройство? 2. * Вспомним из главы 5, что системной функции mknod требуется разрешение суперпользователя на создание нового специального файла устройства. Если доступ к устройству управляется правами доступа к файлу, почему функции mknod нужно разрешение суперпользователя? 3. Напишите программу, которая проверяет, что файловые системы на диске не перекрываются. Этой программе потребовались бы два аргумента: файл устройства, представляющий дисковый том, и дескриптор файла, откуда берутся номера секторов и их размер для диска данного типа. Для проверки отсутствия перекрытий этой программе понадобилась бы информация из суперблоков. Будет ли такая программа всегда правильной? 4. Программа mkfs инициализирует файловую систему на диске путем создания суперблока, выделения места для списка индексов, включения всех информационных блоков в связанный список и создания корневого каталога. Как бы вы написали программу mkfs? Как изменится эта программа при наличии таблицы содержимого тома? Каким образом следует инициализировать таблицу содержимого тома? 5. Программы mkfs и fsck (глава 5) являются программами пользовательского уровня, а не частью ядра. Прокомментируйте это. 6. Предположим, что программисту нужно разработать базу данных, работающую в среде ОС UNIX. Программы базы данных выполняются на пользовательском уровне, а не в составе ядра. Как система управления базой данных будет взаимодействовать с диском? Подумайте над следующими вопросами: • Использование стандартного интерфейса файловой системы вместо непосредственной работы с неструктурированными данными на диске, • Потребность в быстродействии, • Необходимость знать, когда фактически данные располагаются на диске, • Размер базы данных: должна ли она помещаться в одной файловой системе, занимать собой весь дисковый том или же располагаться на нескольких дисковых томах? 7. Ядро системы UNIX по умолчанию предполагает, что файловая система располагается на идеальных дисках. Однако, диски могут содержать ошибки, которые делают непригодными и выводят из строя определенные сектора, несмотря на то, что остальная часть диска осталась "пригодной". Как дисковому драйверу (или интеллектуальному контроллеру диска) следует учитывать небольшое количество плохих секторов. Как это отразилось бы на производительности системы? 8. При монтировании файловой системы ядро запускает процедуру открытия для данного драйвера, но позже освобождает индекс специального файла устройства по завершении выполнения вызова системной функции mount. При демонтировании файловой системы ядро обращается к индексу специального файла устройства, запускает процедуру закрытия для данного драйвера и вновь освобождает индекс. Сравните эту последовательность операций над индексом, а также обращений к процедурам открытия и закрытия драйвера, с последовательностью действий, совершаемых при открывании и закрывании устройства блочного типа. Прокомментируйте результаты сравнения. 9. Выполните программу, приведенную на Рисунке 10.14, но направьте вывод данных в файл. Сравните содержимое файла с содержимым выводного потока, когда вывод идет на терминал. Вам придется прервать процессы, чтобы остановить их; только прежде пусть они получат достаточно большое количество данных. Что произойдет, если вызов функции write в программе заменить на printf(output); 10. Что произойдет, если пользователь попытается выполнить редактирование текста на фоне программы: ed file& Обоснуйте ответ. 11. К файлам терминалов обычно устанавливаются следующие права доступа crw-w-w- 2 mjb lus 33,11 Oct 25 20:27 tty61 при входе пользователя в систему. То есть, чтение и запись разрешаются пользователю с именем "mjb", а остальным пользователям разрешена только запись. Почему? 12. Предположим, что вам известно имя файла терминала вашего товарища. Напишите программу записи сообщений с вашего терминала на терминал вашего товарища. Какая еще информация вам нужна, чтобы закодировать приемлемое воспроизведение обычной команды write? 13. Выполните команду stty: если параметры не указаны, она выбирает значения установок терминала и сообщает их пользователю. В противном случае пользователь может в интерактивном режиме сделать различные установки сам. 14. Напишите элементарный строковый интерфейс, записывающий идентификатор машины в начале каждой строки выводного потока. 15. В каноническом режиме пользователь может на время приостановить вывод данных на терминал, нажав последовательность клавиш ‹Ctrl-s›, и продолжить вывод, нажав ‹Ctrl-q›. Как в стандартном строковом интерфейсе реализуется эта особенность? 16. *Процесс начальной загрузки порождает getty-процесс для каждой терминальной линии в системе. Что произошло бы, если бы для одного и того же терминала существовали бы одновременно два getty-процесса, ожидающие регистрации пользователя? Может ли ядро помешать этому? 17. Пусть командный процессор shell реализован таким образом, что он "игнорирует" конец файла и продолжает считывать данные из стандартного ввода. Что произошло бы, если бы пользователь (в регистрационном shell'е) угадал конец файла и продолжил ввод с клавиатуры? 18. *Предположим, что процесс считывает данные с операторского терминала, но игнорирует или улавливает сигналы о "зависании". Что произойдет, когда процесс продолжит считывать данные с операторского терминала после зависания? 19. Программа getty-процесса несет ответственность за открытие терминальной линии, а программа login — за проверку регистрационных имен и паролей. Какие преимущества в том, что эти функции выполняются отдельными программами? 20. Рассмотрим два метода реализации драйвера косвенного терминала ("/dev/tty"), описанные в разделе 10.3.6. Какие различия между ними чувствует пользователь? (Совет: подумайте о системных функциях stat и fstat). 21. Разработайте метод планирования выполнения модулей потока, в соответствии с которым ядро имеет в своем составе специальный процесс, выполняющий процедуры обслуживания модулей тогда, когда выполнение этих процедур запланировано. 22. * Разработайте схему построения виртуальных терминалов (окон) с использованием традиционных (не потоковых) драйверов. 23. * Разработайте метод реализации виртуальных терминалов с использованием потоков, в котором мультиплексированием ввода-вывода между виртуальным и физическим терминалами занимался бы один из модулей ядра, а не пользовательский процесс. Опишите механизм соединения потоков со сверткой и разверткой. Что лучше: включить модуль, осуществляющий мультиплексирование, в состав ядра или построить его как пользовательский процесс? 24. Команда ps сообщает интересную информацию об активности процессов в работающей системе. В традиционных реализациях ps считывает информацию из таблицы процессов, прямо из памяти ядра. Такой метод не совсем удобен в среде разработки, когда размер записей таблицы процессов меняется и команде ps становится нелегко обнаружить в таблице соответствующие поля. Разработайте драйвер, нечувствительный к изменениям среды. Примечания:2 А что же версия IV? Модификация внутреннего варианта системы получила название «версия V». 3 В некоторых реализациях системы UNIX операционная система взаимодействует с собственной операционной системой, которая, в свою очередь, взаимодействует с аппаратурой и выполняет необходимые функции по обслуживанию системы. В таких реализациях допускается инсталляция других операционных систем с загрузкой под их управлением прикладных программ параллельно с системой UNIX. Классическим примером подобной реализации явилась система MERT [Lycklama 78a]. Более новым примером могут служить реализации для компьютеров серии IBM 370 [Felton 84] и UNIVAC 1100 [Bodenstab 84]. 29 И наоборот, системная функция fcntl обеспечивает контроль над действиями, производимыми на уровне дескриптора файла, но не на уровне устройства. В других реализациях функция ioctl применима для файлов всех типов. 30 На практике вывод на печать обычно управляется специальными процессами буферизации, и права доступа устанавливаются таким образом, чтобы только система буферизации могла обращаться к принтеру. 31 Не существует иного способа установить, что символьный и блочный драйверы ссылаются на одно и то же устройство, кроме просмотра таблиц системной конфигурации и текста программ драйвера. 32 В этом разделе рассматривается использование терминалов ввода-вывода, которые передают все символы, введенные пользователем, без обработки. 33 В данной главе используется общий термин "возврат каретки" для обозначения символов возврата каретки и перевода строки. |
|
||
|
Главная | В избранное | Наш E-MAIL | Прислать материал | Нашёл ошибку | Наверх |
||||
|
|
||||